Improving AIBO with Artificial Intelligence Technique
|
|
|
- Rodney Gilmore
- 5 years ago
- Views:
Transcription
1 Improving AIBO with Artificial Intelligence Technique Gun A. Lee Virtual Reality and Interactive Media Laboratory, Department of Computer Science & Engineering, POSTECH, Pohang, , Republic of Korea Abstract The robot industry is rapidly growing recently, and now the application fields of robots are not restricted to industrial purpose, but are expanded to entertainments, since the advent of AIBO, the first robot pet of Sony corporation. In this paper, we describe the current state-of-the-art of the robot pet AIBO. In addition, we suggest some new functions for AIBO and show those can be achieved by using modern artificial intelligence techniques. 1. Introduction A robot with an artificial intelligence is one of the famous subject matter of scientific fictions, and films. To make a robot that can talk with humans, think like humans and behave like humans is a dream of all from long time ago. Nowadays, the rapid growth of science and engineering field, especially artificial intelligence in computer science and robotics in mechanical engineering, is realizing this dream, and the entertainment market is the one that adopted these technologies rapidly. Sony corporation[1] has announced their first entertainment robot AIBO[2] in 1999, and it was the first step of robot industry entering the public entertainment market. The appearance of AIBO was really sensational among the people. Although there are several other robot pets, such as Furby[3], Teckno[4], i-cybie[5] and NeCoRo[6], AIBO has much far different and advanced features than the others. In this paper, some newly suggested functions for AIBO using artificial intelligence techniques are illustrated. For this, we first review about robot pets and current state-of-the-art of AIBO. And then suggest some new expected functions and illustrate how to achieve this functions using artificial intelligence techniques.


![And several computer raising simulation games, such as Princess maker[7] and Creatures[8], were developed and introduced to the PC game market.](/docs-images/88/115280984/images/2-2.jpg "Today, lots of raising simulation games are developed and sold in the game market and it is one of the popular genre in the game industry.")
![Actually, the first game for raising a pet was built on a portable mini video game device, and it was called Tamagochi which was developed by Bandai[9], a toy company in Japan.](/docs-images/88/115280984/images/2-3.jpg "With Tamagochi children could raise a virtual pet with their mini video game device.")
2 2. Robot Pets To say about the history of robot pets, we may trace back to when the first doll was made. A doll is very popular toy in the human history, and it is one of the natural desires of human, willing to have something resembling him/herself. Though the human race had a long history of making dolls, it was not easy to make dolls act or behave like humans. In recent days, some of the people tried to achieve this will inside the virtual space using computer simulation techniques. And several computer raising simulation games, such as Princess maker[7] and Creatures[8], were developed and introduced to the PC game market. Today, lots of raising simulation games are developed and sold in the game market and it is one of the popular genre in the game industry. Actually, the first game for raising a pet was built on a portable mini video game device, and it was called Tamagochi which was developed by Bandai[9], a toy company in Japan. With Tamagochi children could raise a virtual pet with their mini video game device. It asks the user to feed when it feels hungry, needs remedy when it is sick, grows as the time flows, and can play games with users. Though the users were able to raise and take care of virtual pets with these kind of video games, users were not allowed to touch and fully interact with their pets, users were only allowed to watch them through a display device. Inspired by the desire of touch, a lot of interactive dolls were designed, some of them are shown in figure 1. Today, we have so many toys moving around using electronic components, and they vary from one that only repeats a simple movement to complicated ones that show complex responses to the user. Among these, AIBO is the most advanced one, and rather than treating it as a toy, it is almost a full computer system embedded autonomous robot. [Figure 1] Interactive toy pets: Furby(top left), i-cybie(top right), Tekno and its variations(bottom left) and NeCoRo(bottom right).
![3. AIBO AIBO is an entertainment robot developed by Sony corporation[1].](/docs-images/88/115280984/images/3-0.jpg "The word AIBO is an acronym of Artificial Intelligence robot, and it has a same pronunciation with a Japanese word 相棒 ( あい-ぼう ), meaning close friends.")

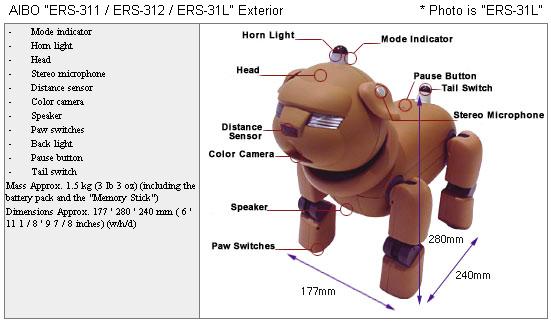
3 3. AIBO AIBO is an entertainment robot developed by Sony corporation[1]. The word AIBO is an acronym of Artificial Intelligence robot, and it has a same pronunciation with a Japanese word 相棒 ( あい-ぼう ), meaning close friends. As its name suggests, AIBO is developed as an robot with artificial intelligence, and its purpose if to be a good friend of human beings, just like real pets. Figure 2 shows the appearance of AIBO. [Figure 2] AIBO From 1999, when the first AIBO was born, AIBO has been refined and improved and now we have several models. Figure 3 shows the product line up of the AIBO and now only the three latest models are available to the customers at the market. ERS-100 series were sold out about 50,000 units in Japan, the U.S., and Europe around December of year 2000 [10]. [Figure 3] The product line up of AIBO 3.1 Specifications of AIBO Here we describe the detail hardware and software specifications of AIBO. The hardware of AIBO can be separated into several units: core, head, tail and 4 leg units. The core unit is a box shaped unit, which is placed inside the body of AIBO, and all the other units
4 are attached to this. It contains computing equipments such as CPU and memories. It uses 64-bit MIPS RISC CPU chip and has a 32MB SDRAM and a built in real time clock. Sony s Memory Stick[1] media is used as a secondary memory device and a PC card slot(type-ii) is supported for connecting additional peripheral devices. Usually the PC card slot is used for wireless LAN. While the core unit contains computing equipments, other units contain mechanical parts and sensors for gathering inputs from the real world. AIBO has many motors to move its body parts and it supports up to 20 degree of freedoms on legs, tail, head, mouth and ears. AIBO also has a lot of sensors: a CMOS camera on its head for sensing visual information, a pair of stereo microphone on its ears, IR sensors for sensing distances from the obstacles, acceleration and vibration sensors for detecting the movement of the body, and finally temperature and pressure sensors for sensing the touch of the users. Mechanical devices and sensors are connected to the core unit through a bus[11]. Table 1 contains the detail hardware specifications of AIBO ERS- 210 model. For detail illustration of AIBO s features, refer to the appendix A. AIBO is based on the OPEN-R architecture, Sony s standard open architecture for entertainment robots[12], and it runs on Aperios[13], an real-time operating system kernel of Sony corporation. There are two types of application software for AIBO: an AIBO-ware and PC applications for AIBO. AIBO ware is loaded in a Memory Stick media and runs on the AIBO itself. On the contrary, PC applications for AIBO run on a conventional personal computer. There are several AIBO-wares and PC applications available from Sony and it will be described in detail later. AIBO also has software development tools: the R-CODE interpreter and the OPEN-R SDK. The former is easy to learn and use and it is for general users. The latter is for professionals and it supports full features for controlling and accessing the AIBO hardware. We will go into details of both development environments later. 3.2 Functions of AIBO The basic function of AIBO is similar to that of computers. AIBO gathers information from all the sensors on it, and processes it, and then gives output using its output devices, like controlling motors, etc. The designers of AIBO have defined basic instincts of AIBO: love, curiosity, movement, hunger & sleep, and AIBO behaves under these instincts. It tries to fulfill these five desires and feels good if those are achieved, or bad if not. AIBO can also express its feelings through body motions, tonal language and LED display, which is placed on its head. As computers behave according to the software it is running, AIBO s behavior is also determined by what software(aibo-ware) is loaded on it. According to the software it runs, AIBO could be able to learn how the behave, recognize voice or tonal language commands, sing a song, track specific objects, take pictures, recognize the face of its owner, or keep houses from
![intruders. AIBO even can play a robot soccer, there is also an international robot soccer game league for AIBO[14][15].](/docs-images/88/115280984/images/5-0.jpg "Detail functions of each AIBO-ware and PC applications are described in appendix B and C. Also voice commands that AIBO can recognize are listed in appendix D.")
5 intruders. AIBO even can play a robot soccer, there is also an international robot soccer game league for AIBO[14][15]. Detail functions of each AIBO-ware and PC applications are described in appendix B and C. Also voice commands that AIBO can recognize are listed in appendix D. [Table 1] Detailed Specification of AIBO ERS-210 hardware.
6 3.3 Programming AIBO As previously mentioned, there are two ways to write a program for AIBO, one is using R- CODE and the other is using OPEN-R SDK. R-CODE[16] is a simple programming language, easy to learn and use. It looks similar to BASIC and runs on R-CODE interpreter. Users can write new simple behaviors of AIBO using R-CODE. In R-CODE only 16-bit integer variables are allowed and users can obtain sensor data from system predefined variables. R-CODE supports basic arithmetic operations, control statements, stacks and subroutines. Users can write R-CODE programs using conventional text editors. To execute the program users must copy the program into a Memory Stick that has R- CODE interpreter on it. Figure 4 shows an example program written in R-CODE. The program tells AIBO to play a motion named Akubi_sit when a tonal command ID number 1 is recognized. Full list of R-CODE commands are given in appendix E. R-CODE interpreter can be freely downloaded from the website[16]. [Figure 4] An example R-CODE program OPEN-R SDK gives the user full access and control of AIBO. It is an object oriented software library written in C++ language, and consists of OPEN-R APIs. It is also free for downloading from the website[17]. It allows the user to control each joints and other display devices, such as LED displays and speakers. Users can get raw data from all sensors, e.g. image data from camera, wave formatted sound data from microphone, etc. It also has APIs to support networking(ipv4), so the users can easily utilize networking devices, such as wireless LANs. Unfortunately, high level functions, such as gaits, voice and object recognition functions are excluded. Each program modules written for AIBO run concurrently and they are able to communicate
7 with each other. For example, motion control module may ask the voice recognition module, whether a specific command was recognized, before playing a specific motion. Each program modules are complied separately and the files containing each complied modules are loaded into a Programmable AIBO Memory Stick in order to be executed on AIBO. The Programmable AIBO Memory Stick contains Aperios(the OS kernel of AIBO) and when the AIBO is turned on it boots up and loads all the program modules on the Memory Stick into the memory and executes them. For further information about programming with OPEN-R SDK, please refer to OPEN-R SDK Programmer s Guide[12], which is available at the website[17]. 4. Improving AIBO with Artificial Intelligence Technique Although AIBO already has a lot of features that real pets have, more sophisticated behaviors requiring intelligence is expected in order to help users in their daily lives. Real pets do not only response to lovely touch of its master, but they can also help them, e.g. carry small objects, find something or somebody the master is looking for, etc. Here we suggest two new behaviors for AIBO, those are seemed to need artificial intelligence techniques to carry out. These behaviors could be implemented as a program module using OPEN-R SDK, and are feasible enough to cope with modern artificial intelligence techniques. 4.1 AIBO, come here! The first new behavior we suggest is named AIBO, come here! As its name shows, AIBO may come to its owner wherever he(or she) is. The current implementation of AIBO also has a similar function that lets AIBO to head to the owner whenever he(or she) calls it. But, since the behavior is currently implemented to simply turn around to where the calling sound came and find the owner there, AIBO will fail to find its owner when the owner is out of sight, e.g. in the other room. To over come this defect, AIBO needs to know the map of the whole house. Then if AIBO fails to find its owner, it may ask the owner where he(or she) is and may find the way and come to the room where he(she) is in. To achieve this, some new basic functions are needed: map construction, room recognition and way finding. There are three ways to construct a map. First, the owner can manually construct the map using some software tools, and upload it into AIBO s memory. This is the most naïve approach to map construction, but it is not a natural way at all. Another approach is to make the process fully automated. AIBO may construct the full map of the house while it wanders around the house. In order to make this work out, AIBO must have full object recognition function rather than the current implementation, which is recognizing

8 simple shapes and colors. In addition, it may also require common sense to tell where the room is, e.g. whether it is a bathroom or a bedroom. This seems quite difficult with current AIBO s computing power and modern artificial intelligence techniques. Finally we suggest a semi-automatic approach. This is a similar way how people show their houses to guests. The owner may take AIBO to each place of the house and tell where it is. A map can be represented with a graph, each nodes representing a room, and each link representing a door. Figure 5 shows an example map represented with a graph. [Figure 5] An example map represented with a graph. There is one thing missing to realize the semi-automatic approach. AIBO needs to recognize each room. Though AIBO has an object recognition function, the current computer vision technique seems to be insufficient to recognize each room, since there are lots of object in it and their configuration changes continuously. As an alternative to using full object recognitions, we suggest to use visual tags as an aid for object recognition. An appropriate solution for visual tagging technique can be found from one of the Rekimoto s work: the CyberCode[18]. Since CyberCodes give information about position and orientation of the tag in addition to IDs, AIBO may utilize this information, too. Tagging doors rather than rooms have lots of advantages. Although AIBO can recognize each room, and it is able say where it is, AIBO have to find doors to move to another room. In addition, since a room is a large space for AIBO, it may fail to find tags within the room, and where to place a tag in the room has no clear answer. If doors are tagged instead of rooms, it will be much more efficient and clear for recognition. Additionally it has another advantage that users may show and tell AIBO only the doors(ways) to each rooms, and carrying AIBO from one room to another will be not necessary. Current voice recognition function of AIBO seems to be sufficient for recognizing the command AIBO, come here! and other words needed to indicate a place, such as bedroom or kitchen.
9 Finally, AIBO has to find the way from current position to the target position using the map. This behavior can be separated into two steps. First, AIBO must find the best path, and then it must move from one room to another, recognizing the doors along the path previously found. Finding a best(shortest) path in a graph from one node to another is a basic search problem that has been treated in artificial intelligence field for a long time. And since most of the house has not much complicated structure, the map graph would be simple enough to treat it with simple searching algorithms, such as depth-first-search. As a result, a sequence of rooms(or doors) will be given and now AIBO has only to follow the resulted path. To follow through the path, AIBO first has to find the tag on the door and recognize it. After recognition, it has to pass trough the door and then find the next door(actually the tag). During this some unintended situations may happen, e.g. the door could be closed. To resolve these situations continuous planning must be carried out. The planning could be done using STRIPS operators and POP algorithm. Figure 6 shows an example expected result of planning. [Figure 6] An example expected result of planning for passing through a door 4.2 Go, get the newspaper. This new behavior also can be implemented using artificial intelligence techniques that we previously described. Basically, it is same to way finding behavior except carrying an object. So we only need an additional function to recognize and carry an object. Current AIBO implementation has a physical problem for carrying objects. It has neither a manipulator to pick up an object nor a space to put it on. To solve this problem, maybe the mouth joint could be redesigned to make it appropriate to carry things. Since object recognition of current implementation is much limited, we suggest to design an easy recognized basket for AIBO and carry things within it, instead of carrying things directly.

10 The same way finding and planning techniques used before could be applied here again. Figure 7 shows an example expected result of planning for this behavior. [Figure 7] An example expected result of planning for carrying a newspaper from the front door to the living room. We can think of more behaviors similar to these two, e.g. Take this to the living room, Take the newspaper to daddy, etc. And these behaviors also could be easily implemented, utilizing the previous way finding and planning functions we ve implemented. 5. Conclusion We ve reviewed the current state-of-the-art of AIBO, a robot pet developed by Sony corporation. AIBO was sufficiently equipped to mimic real pets, it had lots of sensory devices, fully motorcontrolled body parts and enough computing power. There were lots of softwares enabling AIBO to mimic behaviors of the real pets. Software development environments were also provided for advanced users and users were allowed to program new behaviors for AIBO with it. According to this, we suggested to add some new behaviors those are a little bit sophisticated, requiring artificial intelligence techniques to achieve them. Outlines were given for applying artificial intelligence to implement those behaviors.
11 References [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] AIBO ERS 210 Entertainment Robot 2 nd Generation Basics Reference Guide: Frequently Asked Questions, Sony Corporation, Dec. 19, [11] OPEN-R SDK: Model Information for ERS-210, Sony Corporation, [12] OPEN-R SDK: Programmer s Guide, Sony Corporation, [13] [14] [15] Wako Tojima, 로봇의시대 (Robot Kyoshitu), Science Books Co. Ltd., Seoul, Korea, [16] [17] [18] Jun Rekimoto and Yuji Ayatsuka, CyberCode: Designing Augmented Reality Environments with Visual Tags, in Proceedings of Designing Augmented Reality Environments, 2000.

12 Appendix A Feature illustrations of AIBO
13




14 Appendix B List of AIBO-wares AIBO Life - Raise from toddler to child, teen & adult - Interacting with AIBO accelerates the maturing. - Teach Actions - Give a name to AIBO - Tell your name - Hello AIBO - Fully matured adult AIBO - 75 Voice Command Recognition - Mimicking - Social behaviors Party Mascot - Games - Sing a song and dances AIBO Speed Board - Skate with voice commands - Record and play routines AIBO Explorer - Fully matured AIBO - Surveillance mode - Hyperactive Boost mode AIBO Recognition - Fully matured AIBO - Owner Recognition - Self Recharging on Energy Station



15 Appendix C List of PC application softwares for AIBO AIBO Fun Pack - Check AIBO status - Download photos AIBO Messenger - Notice received - Read an - Read favorite websites AIBO Navigator - Control and Navigate - Wireless LAN - Video and sound monitoring - Take Picture - Send commands through wireless LAN - Force feedback Joystick support AIBO Master Studio - Create and edit original sound, motion, LED data and Behavior - Voice recognition - Wireless LAN debugging - Import/Export Actions for other AIBO wares
16 Appendix D Voice Commands Calling out - AIBO (or Registered name) - What s your Name? Greetings - Good morning? - Hello - Good bye/bye bye - I m here - Say hello - Shake - Other hand / Other paw - Shake hands Admonishing, praising and encouraging - Good boy! / Good girl! - Don t do it / Don t do that - Go for it Questions - How old are you? - Are you alright? - Are you tired? - Are you Hungry? - I love you / I like you Commands - Take a picture - Sit down - Stand up - Go forward - Go Back - Stop - Lay down - Go right / Turn right - Go left / Turn left - Walk around - Get up - Find the ball / Where s the ball - Kick the ball - Let s play / Let s talk - Be quiet - Let s dance - Take a pose / Pose for me / pose - Karate chop
17 Appendix E List of R-CODE commands Control Structures : defines a line to be a label. GO jumps the process to the specified label. IF conditional test statement. SWITCH branches the process. CSET sets a context value. CASE branches the process. FOR generates a FOR loop. NEXT terminates a FOR Loop. WHILE generates a WHILE loop. WEND terminates a WHILE Loop. REPEAT generates a REPEAT loop. UNTIL terminates a REPEAT Loop. DO generates a DO loop. LOOP terminates a DO loop. BREAK breaks a loop. CALL calls a subroutine. ARG fetches an argument of a subroutine. RETURN returns from a subroutine. RET returns from a subroutine (for context version). ONCALL registers an interrupt routine. RESUME returns from an interrupt routine. Variables GLOBAL LOCAL LET SET declares a variable as a global variable. declares a variable as a local variable. assigns a value (simple assignment). assigns a value (assignment with a special function)
18 Appendix E List of R-CODE commands (continued) Operations ADD SUB MUL DIV MOD AND IOR XOR NOT LAND LIOR LNOT EQ NE LT LE GT GE RND Addition Subtraction Multiplication Division Remainder Logical AND Logical OR Exclusive OR Negation Logical AND (Boolean operation) Logical OR (Boolean operation) Negation (Boolean operation) Equal to Not equal to Less than Less than or equal to Greater than Greater than or equal to Random number Stack Operations PUSH pushes data onto a stack. POP pops data from a stack. DUP copies the top entry on a stack. JT jumps if the top entry on a stack is true. JF jumps if the top entry on a stack is false.
A man s best friend. Get attached, wirelessly. Your Artificial Intelligence Companion
 A man s best friend. Get attached, wirelessly. Your Artificial Intelligence Companion Imagine. The fascinating AIBO concept is firmly established in the ambitious project from Sony to create intelligent
A man s best friend. Get attached, wirelessly. Your Artificial Intelligence Companion Imagine. The fascinating AIBO concept is firmly established in the ambitious project from Sony to create intelligent
Imagine. AIBO will become, in fact, your best friend.
 Imagine. The fascinating AIBO concept is part of the very conscious ambition from Sony to create intelligent companions for people. To achieve this, a groundbreaking vision to combine Sony fl agship technologies
Imagine. The fascinating AIBO concept is part of the very conscious ambition from Sony to create intelligent companions for people. To achieve this, a groundbreaking vision to combine Sony fl agship technologies
Entertainment Robot aibo Announced
 News & Information Entertainment Robot aibo Announced Sony Corporation 1-7-1 Konan, Minato-ku, Tokyo No. 17-105E November 1, 2017 Tokyo November 1, 2017 - Sony Corporation (Sony) is today proud to announce
News & Information Entertainment Robot aibo Announced Sony Corporation 1-7-1 Konan, Minato-ku, Tokyo No. 17-105E November 1, 2017 Tokyo November 1, 2017 - Sony Corporation (Sony) is today proud to announce
FPGA-based Emotional Behavior Design for Pet Robot
 FPGA-based Emotional Behavior Design for Pet Robot Chi-Tai Cheng, Shih-An Li, Yu-Ting Yang, and Ching-Chang Wong Department of Electrical Engineering, Tamkang University 151, Ying-Chuan Road, Tamsui, Taipei
FPGA-based Emotional Behavior Design for Pet Robot Chi-Tai Cheng, Shih-An Li, Yu-Ting Yang, and Ching-Chang Wong Department of Electrical Engineering, Tamkang University 151, Ying-Chuan Road, Tamsui, Taipei
Help Guide. Locating parts and controls. Getting ready for your life with aibo
 This is provided to help you when you have issues or questions in the course of your life with aibo. The information contained in this is provided based on the assumption that aibo's system software and
This is provided to help you when you have issues or questions in the course of your life with aibo. The information contained in this is provided based on the assumption that aibo's system software and
The City School. Learn Create Program
 Learn Create Program What is Scratch? Scratch is a free programmable toolkit that enables kids to create their own games, animated stories, and interactive art share their creations with one another over
Learn Create Program What is Scratch? Scratch is a free programmable toolkit that enables kids to create their own games, animated stories, and interactive art share their creations with one another over
(1) Entertainment Robot ERS-110. Operation Manual. C 1999 by Sony Corporation
 Entertainment Robot ERS-110. Operation Manual. C 1999 by Sony Corporation") 3-867-061-11(1) Entertainment Robot ERS-110 Operation Manual C 1999 by Sony Corporation Entertainment Robot AIBO ERS-110 Operation Manual OPEN-R is the standard interface for the entertainment robot system
3-867-061-11(1) Entertainment Robot ERS-110 Operation Manual C 1999 by Sony Corporation Entertainment Robot AIBO ERS-110 Operation Manual OPEN-R is the standard interface for the entertainment robot system
BEng (Hons.) Electronic Engineering. Cohort: BEE/10B/FT. Examinations for / Semester 2
 Electronic Engineering. Cohort: BEE/10B/FT. Examinations for / Semester 2") BEng (Hons.) Electronic Engineering Cohort: BEE/10B/FT Examinations for 2011-2012 / Semester 2 MODULE: INNOVATION AND MARKETING MODULE CODE: MKTG1109 Duration: 2 Hours 30 minutes Reading Time: 10 Minutes
BEng (Hons.) Electronic Engineering Cohort: BEE/10B/FT Examinations for 2011-2012 / Semester 2 MODULE: INNOVATION AND MARKETING MODULE CODE: MKTG1109 Duration: 2 Hours 30 minutes Reading Time: 10 Minutes
Finch Robot: snap level 4
 Finch Robot: snap level 4 copyright 2017 birdbrain technologies llc the finch is a great way to get started with programming. we'll use snap!, a visual programming language, to control our finch. First,
Finch Robot: snap level 4 copyright 2017 birdbrain technologies llc the finch is a great way to get started with programming. we'll use snap!, a visual programming language, to control our finch. First,
Scratch Lesson Plan. Part One: Structure. Part Two: Movement
 Scratch Lesson Plan Scratch is a powerful tool that lets you learn the basics of coding by using easy, snap-together sections of code. It s completely free to use, and all the games made with scratch are
Scratch Lesson Plan Scratch is a powerful tool that lets you learn the basics of coding by using easy, snap-together sections of code. It s completely free to use, and all the games made with scratch are
Customer Support. Before using this software, please read the accompanying End-User License Agreement which governs use of this software.
 4-669-904-11(1) R 2 Notice to Users 2002 Sony Corporation All rights reserved. This manual and the software described herein, in whole or in part, may not be reproduced, translated or reduced to any machine-readable
4-669-904-11(1) R 2 Notice to Users 2002 Sony Corporation All rights reserved. This manual and the software described herein, in whole or in part, may not be reproduced, translated or reduced to any machine-readable
Understanding the App. Instruction Manual
 Understanding the App Instruction Manual Let s get started. Now that your Tracking Unit is activated, let s explore the App some more. Need help setting up your smart collar? Please view the Getting Started
Understanding the App Instruction Manual Let s get started. Now that your Tracking Unit is activated, let s explore the App some more. Need help setting up your smart collar? Please view the Getting Started
288 Seymour River Place North Vancouver, BC V7H 1W6
 288 Seymour River Place North Vancouver, BC V7H 1W6 animationtoys@gmail.com February 20 th, 2005 Mr. Lucky One School of Engineering Science Simon Fraser University 8888 University Dr. Burnaby, BC V5A
288 Seymour River Place North Vancouver, BC V7H 1W6 animationtoys@gmail.com February 20 th, 2005 Mr. Lucky One School of Engineering Science Simon Fraser University 8888 University Dr. Burnaby, BC V5A
5 State of the Turtles
 CHALLENGE 5 State of the Turtles In the previous Challenges, you altered several turtle properties (e.g., heading, color, etc.). These properties, called turtle variables or states, allow the turtles to
CHALLENGE 5 State of the Turtles In the previous Challenges, you altered several turtle properties (e.g., heading, color, etc.). These properties, called turtle variables or states, allow the turtles to
SYTLE FORMAL : The Online Dog Trainer In-Depth Review
 ***IMPORTANT DISCLAIMER*** Please DO NOT copy and paste directly to your site without changing the review considerably (Google WILL penalize duplicate content) ***END DISCLAIMER*** SYTLE FORMAL : The Online
***IMPORTANT DISCLAIMER*** Please DO NOT copy and paste directly to your site without changing the review considerably (Google WILL penalize duplicate content) ***END DISCLAIMER*** SYTLE FORMAL : The Online
Turtle Ballet: Simulating Parallel Turtles in a Nonparallel LOGO Version. Erich Neuwirth
 Turtle Ballet: Simulating Parallel Turtles in a Nonparallel LOGO Version Erich Neuwirth University of Vienna, Dept. of Statistics and Decision Support Systems Computer Supported Didactics Working Group
Turtle Ballet: Simulating Parallel Turtles in a Nonparallel LOGO Version Erich Neuwirth University of Vienna, Dept. of Statistics and Decision Support Systems Computer Supported Didactics Working Group
Visual Reward/Correction. Verbal Reward/Correction. Physical Reward/Correction
 SIT - STAY DRILL The Sit-Stay Drill is a one-on-one training tool designed to help you learn perfect timing for when and how to reward positive behavior. Consistently rewarding positive behavior and correcting
SIT - STAY DRILL The Sit-Stay Drill is a one-on-one training tool designed to help you learn perfect timing for when and how to reward positive behavior. Consistently rewarding positive behavior and correcting
Coding with Scratch - First Steps
 Getting started Starting the Scratch program To start using Scratch go to the web page at scratch.mit.edu. Page 1 When the page loads click on TRY IT OUT. Your Scratch screen should look something like
Getting started Starting the Scratch program To start using Scratch go to the web page at scratch.mit.edu. Page 1 When the page loads click on TRY IT OUT. Your Scratch screen should look something like
University of Pennsylvania. From Perception and Reasoning to Grasping
 University of Pennsylvania GRASP LAB PR2GRASP: From Perception and Reasoning to Grasping Led by Maxim Likhachev Kostas Daniilides Vijay Kumar Katherine J. Kuchenbecker Jianbo Shi Daniel D. Lee Mark Yim
University of Pennsylvania GRASP LAB PR2GRASP: From Perception and Reasoning to Grasping Led by Maxim Likhachev Kostas Daniilides Vijay Kumar Katherine J. Kuchenbecker Jianbo Shi Daniel D. Lee Mark Yim
Free Bonus: Teach your Miniature Schnauzer 13 Amazing Tricks!
 Free Bonus: Teach your Miniature Schnauzer 13 Amazing Tricks! You and your Miniature Schnauzer may want to while away the idle hours together sometimes? Then, what better way can there be than to get together
Free Bonus: Teach your Miniature Schnauzer 13 Amazing Tricks! You and your Miniature Schnauzer may want to while away the idle hours together sometimes? Then, what better way can there be than to get together
FreeBonus: Teach your Cavalier King Charles Spaniel 13 Amazing Tricks!
 FreeBonus: Teach your Cavalier King Charles Spaniel 13 Amazing Tricks! You and your King Charles Spaniel may want to while away the idle hours together sometimes? Then, what better way can there be than
FreeBonus: Teach your Cavalier King Charles Spaniel 13 Amazing Tricks! You and your King Charles Spaniel may want to while away the idle hours together sometimes? Then, what better way can there be than
Pretend & Discover Kitty
 User's Manual Baby Amaze Pretend & Discover Kitty 2017 VTech All rights reserved Printed in China 91-003012-000 US Dear Parent, At VTech, we know how much children love to take care of baby dolls. Blending
User's Manual Baby Amaze Pretend & Discover Kitty 2017 VTech All rights reserved Printed in China 91-003012-000 US Dear Parent, At VTech, we know how much children love to take care of baby dolls. Blending
Bluefang. All-In-One Smart Phone Controlled Super Collar. Instruction Manual. US and International Patents Pending
 Bluefang All-In-One Smart Phone Controlled Super Collar Instruction Manual US and International Patents Pending The Only pet collar that gives you: Remote Training Bark Control Containment Fitness Tracking
Bluefang All-In-One Smart Phone Controlled Super Collar Instruction Manual US and International Patents Pending The Only pet collar that gives you: Remote Training Bark Control Containment Fitness Tracking
The integration of dogs into collaborative humanrobot. - An applied ethological approach - PhD Thesis. Linda Gerencsér Supervisor: Ádám Miklósi
 Eötvös Loránd University, Budapest Doctoral School of Biology, Head: Anna Erdei, DSc Doctoral Program of Ethology, Head: Ádám Miklósi, DSc The integration of dogs into collaborative humanrobot teams -
Eötvös Loránd University, Budapest Doctoral School of Biology, Head: Anna Erdei, DSc Doctoral Program of Ethology, Head: Ádám Miklósi, DSc The integration of dogs into collaborative humanrobot teams -
Getting Started. Instruction Manual
 Getting Started Instruction Manual Let s get started. In this document: Prepare you LINK AKC Understand the packaging contents Place Base Station Assemble your smart collar Turn on your Tracking Unit Insert
Getting Started Instruction Manual Let s get started. In this document: Prepare you LINK AKC Understand the packaging contents Place Base Station Assemble your smart collar Turn on your Tracking Unit Insert
Our training program... 4
 1 Introduction Agility truly is the ultimate dog sport! It combines speed and precision, teamwork and independence, dog training skills and handler finesse in a wonderfully complex mix. Agility has the
1 Introduction Agility truly is the ultimate dog sport! It combines speed and precision, teamwork and independence, dog training skills and handler finesse in a wonderfully complex mix. Agility has the
Development of Design of Initial Cat Robot Model for the Use of Early Treatment of Children with Autism Spectrum Disorder (ASD)
") , pp.90-96 http://dx.doi.org/10.14257/astl.2014.52.16 Development of Design of Initial Cat Robot Model for the Use of Early Treatment of Children with Autism Spectrum Disorder (ASD) Keum Hi Mun 1, Ja Young
, pp.90-96 http://dx.doi.org/10.14257/astl.2014.52.16 Development of Design of Initial Cat Robot Model for the Use of Early Treatment of Children with Autism Spectrum Disorder (ASD) Keum Hi Mun 1, Ja Young
Penn Vet s New Bolton Center Launches Revolutionary Robotics-Controlled Equine Imaging System New technology will benefit animals and humans
 Contacts: Louisa Shepard, Communications Specialist for New Bolton Center 610-925-6241, lshepard@vet.upenn.edu Ashley Berke, Penn Vet Director of Communications 215-898-1475, berke@vet.upenn.edu For Immediate
Contacts: Louisa Shepard, Communications Specialist for New Bolton Center 610-925-6241, lshepard@vet.upenn.edu Ashley Berke, Penn Vet Director of Communications 215-898-1475, berke@vet.upenn.edu For Immediate
Writing Simple Procedures Drawing a Pentagon Copying a Procedure Commanding PenUp and PenDown Drawing a Broken Line...
 Turtle Guide Contents Introduction... 1 What is Turtle Used For?... 1 The Turtle Toolbar... 2 Do I Have Turtle?... 3 Reviewing Your Licence Agreement... 3 Starting Turtle... 3 Key Features... 4 Placing
Turtle Guide Contents Introduction... 1 What is Turtle Used For?... 1 The Turtle Toolbar... 2 Do I Have Turtle?... 3 Reviewing Your Licence Agreement... 3 Starting Turtle... 3 Key Features... 4 Placing
!"#$%&'()*&+,)-,)."#/')!,)0#/') 1/2)3&'45)."#+"/5%&6)7/,-,$,8)9::;:<;<=)>6+#-"?!
*&+,)-,).#/')!,)0#/') 1/2)3&'45).#+/5%&6)7/,-,$,8)9::;:<;<=)>6+#-?!") "#$%&'()*&+,)-,)."#/'),)0#/') 1/2)3&'45)."#+"/5%&6)7/,-,$,8)9::;:
"#$%&'()*&+,)-,)."#/'),)0#/') 1/2)3&'45)."#+"/5%&6)7/,-,$,8)9::;:
You can reset your Hatchimal to Baby any time after hatching by pressing the small reset button on the bottom of your Hatchimal with a paperclip.
 General FAQs Tips and Tricks Cheat Sheet We have the Hatchimals Tips and Tricks sheet for you right here! You can print it from home if you need a copy. Click the image below for a larger view before printing.
General FAQs Tips and Tricks Cheat Sheet We have the Hatchimals Tips and Tricks sheet for you right here! You can print it from home if you need a copy. Click the image below for a larger view before printing.
AKC Trick Dog EVALUATOR GUIDE
 AKC Trick Dog EVALUATOR GUIDE 2 November 1, 2017 About AKC Trick Dog Welcome to the AKC Trick Dog program. In AKC Trick Dog, dogs and their owners can have fun learning tricks together. There are 4 levels
AKC Trick Dog EVALUATOR GUIDE 2 November 1, 2017 About AKC Trick Dog Welcome to the AKC Trick Dog program. In AKC Trick Dog, dogs and their owners can have fun learning tricks together. There are 4 levels
Effective Vaccine Management Initiative
 Effective Vaccine Management Initiative Background Version v1.7 Sep.2010 Effective Vaccine Management Initiative EVM setting a standard for the vaccine supply chain Contents 1. Background...3 2. VMA and
Effective Vaccine Management Initiative Background Version v1.7 Sep.2010 Effective Vaccine Management Initiative EVM setting a standard for the vaccine supply chain Contents 1. Background...3 2. VMA and
Promote a Pet Cat Manual
 Promote a Pet Cat Manual Thank you for your interest in becoming a PAP Parent. Give a cat a much needed break from the shelter and a better chance at adoption! 1 Welcome Promote a Pet (PAP) Foster Parents
Promote a Pet Cat Manual Thank you for your interest in becoming a PAP Parent. Give a cat a much needed break from the shelter and a better chance at adoption! 1 Welcome Promote a Pet (PAP) Foster Parents
Virtual Dog Program in Scratch. By Phil code-it.co.uk
 Virtual Dog Program in Scratch By Phil Bagge @baggiepr code-it.co.uk How to use this planning Confident children could work independently through the instructions You could use the step by step guide to
Virtual Dog Program in Scratch By Phil Bagge @baggiepr code-it.co.uk How to use this planning Confident children could work independently through the instructions You could use the step by step guide to
Workbook. Version 3. Created by G. Mullin and D. Carty
 Workbook Version 3 Created by G. Mullin and D. Carty Introduction... 3 Task 1. Load Scratch... 3 Task 2. Get familiar with the Scratch Interface... 3 Task 3. Changing the name of a Sprite... 5 Task 4.
Workbook Version 3 Created by G. Mullin and D. Carty Introduction... 3 Task 1. Load Scratch... 3 Task 2. Get familiar with the Scratch Interface... 3 Task 3. Changing the name of a Sprite... 5 Task 4.
Dr Nick Hill. Contents. Our mission is to develop products which educate and empower owners to provide a higher level of care for their pets.
 Contents Sure Petcare: The Story So Far... 4-7 Connected Product Ecosystem... 8 The Sure Petcare App... 10 App-controlled Pet Doors... 12 App-controlled Feeding and Monitoring... 14 Activity and Behaviour
Contents Sure Petcare: The Story So Far... 4-7 Connected Product Ecosystem... 8 The Sure Petcare App... 10 App-controlled Pet Doors... 12 App-controlled Feeding and Monitoring... 14 Activity and Behaviour
Historical Summary Our Mission Our Products Exhibitions ECMA Summary Contact Details and Location
 1 2 3 4 5 6 7 Historical Summary Our Mission Our Products Exhibitions ECMA Summary Contact Details and Location The company VNT electronics Ltd. was founded in 2004 by the transformation of VMS Software
1 2 3 4 5 6 7 Historical Summary Our Mission Our Products Exhibitions ECMA Summary Contact Details and Location The company VNT electronics Ltd. was founded in 2004 by the transformation of VMS Software
Nathan A. Thompson, Ph.D. Adjunct Faculty, University of Cincinnati Vice President, Assessment Systems Corporation
 An Introduction to Computerized Adaptive Testing Nathan A. Thompson, Ph.D. Adjunct Faculty, University of Cincinnati Vice President, Assessment Systems Corporation Welcome! CAT: tests that adapt to each
An Introduction to Computerized Adaptive Testing Nathan A. Thompson, Ph.D. Adjunct Faculty, University of Cincinnati Vice President, Assessment Systems Corporation Welcome! CAT: tests that adapt to each
Teach Your Dog To Read By Bonnie Bergin Ed.D., Sharon Hogan
 Teach Your Dog To Read By Bonnie Bergin Ed.D., Sharon Hogan Teach Your Dog to Speak 50 K-9 Training Flash Cards puppy - Find best value and selection for your Teach Your Dog to Speak 50 K-9 Training Flash
Teach Your Dog To Read By Bonnie Bergin Ed.D., Sharon Hogan Teach Your Dog to Speak 50 K-9 Training Flash Cards puppy - Find best value and selection for your Teach Your Dog to Speak 50 K-9 Training Flash
The S Files Success with Maria: Sunshine: Biting Reported by S.G. Friedman, PhD and L. McGuire
 The S Files Success with Maria: Sunshine: Biting Reported by S.G. Friedman, PhD and L. McGuire In Press, Good Bird Magazine Volume x(x), pp-pp The S Files are real case studies of behavior challenges faced
The S Files Success with Maria: Sunshine: Biting Reported by S.G. Friedman, PhD and L. McGuire In Press, Good Bird Magazine Volume x(x), pp-pp The S Files are real case studies of behavior challenges faced
Comparative Analysis of Adders Parallel-Prefix Adder for Their Area, Delay and Power Consumption
 2018 IJSRST Volume 4 Issue 5 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology Comparative Analysis of Adders Parallel-Prefix Adder for Their Area, Delay and Power Consumption
2018 IJSRST Volume 4 Issue 5 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology Comparative Analysis of Adders Parallel-Prefix Adder for Their Area, Delay and Power Consumption
PetSpy Premium Dog Training Collar, Models M919-1/M919-2
 PetSpy Premium Dog Training Collar, Models M919-1/M919-2 What is in the Package: M919-1/M919-2 Remote Transmitter Receiver Collar / E-Collar Radio Frequency: 900 Mhz Built-in Batteries information: Transmitter:
PetSpy Premium Dog Training Collar, Models M919-1/M919-2 What is in the Package: M919-1/M919-2 Remote Transmitter Receiver Collar / E-Collar Radio Frequency: 900 Mhz Built-in Batteries information: Transmitter:
B A S E D O N T H E B O O K S B Y J A M E S D E A N A N D K I M B E R L Y D E A N
 M C A N I N C H A R T S C E N T E R S C H O O L S TA G E S E R I E S B A S E D O N T H E B O O K S B Y J A M E S D E A N A N D K I M B E R L Y D E A N WHAT HAPPENS IN THE SHOW Pete a rock and roll cat
M C A N I N C H A R T S C E N T E R S C H O O L S TA G E S E R I E S B A S E D O N T H E B O O K S B Y J A M E S D E A N A N D K I M B E R L Y D E A N WHAT HAPPENS IN THE SHOW Pete a rock and roll cat
Sketch Out the Design
 9 Making an Advanced Platformer he first Super Mario Bros. game was introduced in 1985 and became Nintendo s greatest video game franchise and one of the most influential games of all time. Because the
9 Making an Advanced Platformer he first Super Mario Bros. game was introduced in 1985 and became Nintendo s greatest video game franchise and one of the most influential games of all time. Because the
Little Love Puppy Pal
 Parent s Guide Little Love Puppy Pal 91-003364-000 UK INTRODUCTION Thank you for purchasing the VTech Little Love Puppy Pal! Little Love will take special care of her puppy friend as they interact and
Parent s Guide Little Love Puppy Pal 91-003364-000 UK INTRODUCTION Thank you for purchasing the VTech Little Love Puppy Pal! Little Love will take special care of her puppy friend as they interact and
Grade 3, Prompt for Opinion Writing
 Grade 3, Prompt for Opinion Writing Common Core Standard W.CCR.1 (Directions should be read aloud and clarified by the teacher) Name: Before you begin: On a piece of lined paper, write your name and grade,
Grade 3, Prompt for Opinion Writing Common Core Standard W.CCR.1 (Directions should be read aloud and clarified by the teacher) Name: Before you begin: On a piece of lined paper, write your name and grade,
288 Seymour River Place North Vancouver, BC V7H 1W6
 288 Seymour River Place North Vancouver, BC V7H 1W6 animotiontoys@gmail.com January 25, 2005 Mr. Lucky One School of Engineering Science Simon Fraser University 8888 University Dr. Burnaby, BC V5A 1S6
288 Seymour River Place North Vancouver, BC V7H 1W6 animotiontoys@gmail.com January 25, 2005 Mr. Lucky One School of Engineering Science Simon Fraser University 8888 University Dr. Burnaby, BC V5A 1S6
Dog Training Collar Introduction
 Contents Dog training collar introduction... 3 Find the best stimulation level for your pet... 4 Teaching basic obedience... 5 The Sit command... 5 The Come command... 6 The Stay command... 7 Eliminating
Contents Dog training collar introduction... 3 Find the best stimulation level for your pet... 4 Teaching basic obedience... 5 The Sit command... 5 The Come command... 6 The Stay command... 7 Eliminating
FCI LT LM UNDERGROUND
 FCI LT LM UNDERGROUND Faulted Circuit Indicator for Underground Applications Catalogue # s #29 6028 000 PPZ, #29 6015 000 PPZ, #29 6228 000, #29 6215 000 Description The Navigator LT LM (Load Tracking,
FCI LT LM UNDERGROUND Faulted Circuit Indicator for Underground Applications Catalogue # s #29 6028 000 PPZ, #29 6015 000 PPZ, #29 6228 000, #29 6215 000 Description The Navigator LT LM (Load Tracking,
GARNET STATIC SHOCK BARK COLLAR
 GARNET STATIC SHOCK BARK COLLAR Congratulations on buying this Our K9 Bark Collar, if for any reason you are not 100% completely satisfied with your Bark Collar, please contact me immediately so that I
GARNET STATIC SHOCK BARK COLLAR Congratulations on buying this Our K9 Bark Collar, if for any reason you are not 100% completely satisfied with your Bark Collar, please contact me immediately so that I
YELLOW VIBRATION BARK COLLAR
 YELLOW VIBRATION BARK COLLAR Congratulations on buying this Our K9 Bark Collar, if for any reason you are not 100% completely satisfied with your Bark Collar, please contact me immediately so that I may
YELLOW VIBRATION BARK COLLAR Congratulations on buying this Our K9 Bark Collar, if for any reason you are not 100% completely satisfied with your Bark Collar, please contact me immediately so that I may
Identity Management with Petname Systems. Md. Sadek Ferdous 28th May, 2009
 Identity Management with Petname Systems Md. Sadek Ferdous 28th May, 2009 Overview Entity, Identity, Identity Management History and Rationales Components and Properties Application Domain of Petname Systems
Identity Management with Petname Systems Md. Sadek Ferdous 28th May, 2009 Overview Entity, Identity, Identity Management History and Rationales Components and Properties Application Domain of Petname Systems
Guide Dog Patch Program
 Guide Dog Patch Program This Guide Dog Patch Program, with its collaborative, hands-on activities, was created to teach girls in grades K-8 about the importance of guide dogs. Guide Dog GSSD Program Age
Guide Dog Patch Program This Guide Dog Patch Program, with its collaborative, hands-on activities, was created to teach girls in grades K-8 about the importance of guide dogs. Guide Dog GSSD Program Age
GARNET STATIC SHOCK BARK COLLAR
 GARNET STATIC SHOCK BARK COLLAR Congratulations on buying this Our K9 Bark Collar, if for any reason you are not 100% completely satisfied with your Bark Collar, please contact me immediately so that I
GARNET STATIC SHOCK BARK COLLAR Congratulations on buying this Our K9 Bark Collar, if for any reason you are not 100% completely satisfied with your Bark Collar, please contact me immediately so that I
BARKING! By Molly Stone, Dip. A.B; CDBC; CC-SF/SPCA Animal Behavior Specialist, SPCA of Wake County
 BARKING! By Molly Stone, Dip. A.B; CDBC; CC-SF/SPCA Animal Behavior Specialist, SPCA of Wake County Dogs bark for a variety of reasons: 1) Watchdog Barking serves the dual purpose of alerting pack members
BARKING! By Molly Stone, Dip. A.B; CDBC; CC-SF/SPCA Animal Behavior Specialist, SPCA of Wake County Dogs bark for a variety of reasons: 1) Watchdog Barking serves the dual purpose of alerting pack members
Subdomain Entry Vocabulary Modules Evaluation
 Subdomain Entry Vocabulary Modules Evaluation Technical Report Vivien Petras August 11, 2000 Abstract: Subdomain entry vocabulary modules represent a way to provide a more specialized retrieval vocabulary
Subdomain Entry Vocabulary Modules Evaluation Technical Report Vivien Petras August 11, 2000 Abstract: Subdomain entry vocabulary modules represent a way to provide a more specialized retrieval vocabulary
MIND TO MIND the Art and Science of Training
 1 Mind to Mind Clicking For Stacking Most people think that a dog is conformation trained if it walks on a leash and doesn t sit or bite the judge. Professionals know that training a dog for the Specials
1 Mind to Mind Clicking For Stacking Most people think that a dog is conformation trained if it walks on a leash and doesn t sit or bite the judge. Professionals know that training a dog for the Specials
INTERNATIONAL JOURNAL OF ADVANCED RESEARCH IN ENGINEERING AND TECHNOLOGY (IJARET)
") INTERNATIONAL JOURNAL OF ADVANCED RESEARCH IN ENGINEERING AND TECHNOLOGY (IJARET) International Journal of Advanced Research in Engineering and Technology (IJARET), ISSN 0976 ISSN 0976-6480 (Print) ISSN
INTERNATIONAL JOURNAL OF ADVANCED RESEARCH IN ENGINEERING AND TECHNOLOGY (IJARET) International Journal of Advanced Research in Engineering and Technology (IJARET), ISSN 0976 ISSN 0976-6480 (Print) ISSN
CONTENTS INTRODUCTION MARKET OPPORTUNITIES PROBLEM STATEMENT OUR TECHNOLOGY. About Bastet. Bastet Game and Digital Currency.
 WHITEPAPER 2018 CONTENTS 02 INTRODUCTION 03 MARKET OPPORTUNITIES 05 PROBLEM STATEMENT 06 OUR TECHNOLOGY 07 About Bastet 08 Bastet Game and Digital Currency 09 How it works 09 Benefits of Bastet token to
WHITEPAPER 2018 CONTENTS 02 INTRODUCTION 03 MARKET OPPORTUNITIES 05 PROBLEM STATEMENT 06 OUR TECHNOLOGY 07 About Bastet 08 Bastet Game and Digital Currency 09 How it works 09 Benefits of Bastet token to
6.836 Embodied Intelligence Final Project: Tom and Jerry. Gleb Chuvpilo, Jessica Howe chuvpilo, May 15, 2002
 Final Project: Tom and Jerry chuvpilo, howej @mit.edu May 15, 2002 Contents 1 Introduction 3 1.1 Basic Design Overview................................ 3 1.2 Behavior........................................
Final Project: Tom and Jerry chuvpilo, howej @mit.edu May 15, 2002 Contents 1 Introduction 3 1.1 Basic Design Overview................................ 3 1.2 Behavior........................................
Don't want to bother with cat litter? Japan offers robots 25 January 2018, by Yuri Kageyama
 Don't want to bother with cat litter? Japan offers robots 25 January 2018, by Yuri Kageyama In this Jan. 10, 2018 photo, Yukai Engineering's Tsubasa Tominaga demonstrates Qoobo, a cushion robot, at his
Don't want to bother with cat litter? Japan offers robots 25 January 2018, by Yuri Kageyama In this Jan. 10, 2018 photo, Yukai Engineering's Tsubasa Tominaga demonstrates Qoobo, a cushion robot, at his
MGL Avionics EFIS G2 and iefis. Guide to using the MGL RDAC CAN interface with the UL Power engines
 MGL Avionics EFIS G2 and iefis Guide to using the MGL RDAC CAN interface with the UL Power engines General The RDAC CAN interface forms the bridge between the UL Power ECU and an MGL Avionics G2 EFIS system
MGL Avionics EFIS G2 and iefis Guide to using the MGL RDAC CAN interface with the UL Power engines General The RDAC CAN interface forms the bridge between the UL Power ECU and an MGL Avionics G2 EFIS system
Ultra Min No-Bark Training Collar Ultra Small Ultra Powerful Ultra Control
 No-Bark Dog Training Device Owner s Manual Ultra Min-e 2090 TM No-Bark Training Collar Ultra Ultra Ultra Small Powerful Control D.T. Systems, Inc. 1 Congratulations and thank you for purchasing our Ultra
No-Bark Dog Training Device Owner s Manual Ultra Min-e 2090 TM No-Bark Training Collar Ultra Ultra Ultra Small Powerful Control D.T. Systems, Inc. 1 Congratulations and thank you for purchasing our Ultra
Higher National Unit Specification. General information for centres. Unit code: F3V4 34
 Higher National Unit Specification General information for centres Unit title: Dog Training Unit code: F3V4 34 Unit purpose: This Unit provides knowledge and understanding of how dogs learn and how this
Higher National Unit Specification General information for centres Unit title: Dog Training Unit code: F3V4 34 Unit purpose: This Unit provides knowledge and understanding of how dogs learn and how this
YOU & YOUR PET PET DOORS. get the. freedom. they need
 YOU & YOUR PET PET DOORS does your cat or dog get the freedom they need? Pet Doors Does my pet need a Pet Door? Pet Doors provide your pet with a portal between two different environments, indoors and
YOU & YOUR PET PET DOORS does your cat or dog get the freedom they need? Pet Doors Does my pet need a Pet Door? Pet Doors provide your pet with a portal between two different environments, indoors and
Yertle, The Turtle By Dr. Seuss
 Yertle, The Turtle By Dr. Seuss Yertle the Turtle is a character from the Dr. Seuss book Yertle the Turtle and Other Stories. He Yertle the Turtle and Other Stories is a book written by Dr. Seuss. A collectors
Yertle, The Turtle By Dr. Seuss Yertle the Turtle is a character from the Dr. Seuss book Yertle the Turtle and Other Stories. He Yertle the Turtle and Other Stories is a book written by Dr. Seuss. A collectors
1 Turtle Graphics Concepts
 Transition from Scratch to Python using to Turtle Graphics Practical Sheet Contents 1 Turtle Graphics Concepts... 1 2 First Turtle Program... 1 3 Exploring More Turtle... 2 4 Control Structures in Python
Transition from Scratch to Python using to Turtle Graphics Practical Sheet Contents 1 Turtle Graphics Concepts... 1 2 First Turtle Program... 1 3 Exploring More Turtle... 2 4 Control Structures in Python
A Guide to the TurtleGraphics Package for R
 A Guide to the TurtleGraphics Package for R A. Cena, M. Gagolewski, B. Żogała-Siudem, M. Kosiński, N. Potocka Contents http://www.gagolewski.com/software/turtlegraphics/ 1 The TurtleGraphics Package Introduction
A Guide to the TurtleGraphics Package for R A. Cena, M. Gagolewski, B. Żogała-Siudem, M. Kosiński, N. Potocka Contents http://www.gagolewski.com/software/turtlegraphics/ 1 The TurtleGraphics Package Introduction
Lesson Objectives. Core Content Objectives. Language Arts Objectives
 Lesson Objectives The Wolf and the 4 Seven Little Kids Core Content Objectives Students will: Demonstrate familiarity with The Wolf and the Seven Little Kids Identify the sequence of events in The Wolf
Lesson Objectives The Wolf and the 4 Seven Little Kids Core Content Objectives Students will: Demonstrate familiarity with The Wolf and the Seven Little Kids Identify the sequence of events in The Wolf
An Esterel Virtual Machine (EVM) Aruchunan Vaseekaran
 Aruchunan Vaseekaran") An Esterel Virtual Machine (EVM) Aruchunan Vaseekaran Why Esterel is suited for Deterministic Control Systems Imperative Language Synchronous Concurrency, Preemption Not widely available in low cost systems.
An Esterel Virtual Machine (EVM) Aruchunan Vaseekaran Why Esterel is suited for Deterministic Control Systems Imperative Language Synchronous Concurrency, Preemption Not widely available in low cost systems.
Design of 32 bit Parallel Prefix Adders
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735. Volume 6, Issue 1 (May. - Jun. 2013), PP 01-06 Design of 32 bit Parallel Prefix Adders P.Chaitanya
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735. Volume 6, Issue 1 (May. - Jun. 2013), PP 01-06 Design of 32 bit Parallel Prefix Adders P.Chaitanya
Graphics libraries, PCS Symbols, Animations and Clicker 5
 Clicker 5 HELP SHEET Graphics libraries, PCS Symbols, Animations and Clicker 5 In response to many queries about how to use PCS symbols and/or animated graphics in Clicker 5 grids, here is a handy help
Clicker 5 HELP SHEET Graphics libraries, PCS Symbols, Animations and Clicker 5 In response to many queries about how to use PCS symbols and/or animated graphics in Clicker 5 grids, here is a handy help
VIRTUAL AGILITY LEAGUE FREQUENTLY ASKED QUESTIONS
 We are very interested in offering the VALOR program at our dog training facility. How would we go about implementing it? First, you would fill out an Facility Approval form and attach a picture of your
We are very interested in offering the VALOR program at our dog training facility. How would we go about implementing it? First, you would fill out an Facility Approval form and attach a picture of your
A Novel Approach For Error Detection And Correction Using Prefix-Adders
 A Novel Approach For Error Detection And Correction Using Prefix-Adders B. Naga Jyothi* 1, K.S.N.Murthy 2, K.Srinivasarao 3 *1 PG Student Department of ECE, K.L. University Green fields-522502, AP, India
A Novel Approach For Error Detection And Correction Using Prefix-Adders B. Naga Jyothi* 1, K.S.N.Murthy 2, K.Srinivasarao 3 *1 PG Student Department of ECE, K.L. University Green fields-522502, AP, India
Australian Journal of Basic and Applied Sciences. Performance Analysis of Different Types of Adder Using 3-Transistor XOR Gate
 ISSN:1991-8178 Australian Journal of Basic and Applied Sciences Journal home page: www.ajbasweb.com Performance Analysis of Different Types of Adder Using 3-Transistor XOR Gate Lourdy Nivethitha, V. and
ISSN:1991-8178 Australian Journal of Basic and Applied Sciences Journal home page: www.ajbasweb.com Performance Analysis of Different Types of Adder Using 3-Transistor XOR Gate Lourdy Nivethitha, V. and
Discover the Path to Life with Your Dog. Beginner Obedience Manual 512-THE-DOGS
 Discover the Path to Life with Your Dog Beginner Obedience Manual 512-THE-DOGS WWW.THEDOGGIEDOJO.COM PAGE 01 WELCOME Beginner Obedience Manual Welcome to Beginner Obedience as a Doggie Dojo Dog Ninja.
Discover the Path to Life with Your Dog Beginner Obedience Manual 512-THE-DOGS WWW.THEDOGGIEDOJO.COM PAGE 01 WELCOME Beginner Obedience Manual Welcome to Beginner Obedience as a Doggie Dojo Dog Ninja.
INTRODUCTION. and a hat, a hot pot, a cat hops, a cat in a hat, a fat cat. and Pat are fat, Jat is a big cat, Pat is a little bat.
 INTRODUCTION Lesson Phonics/ Diagraphs Read and Write Coloring Flashcards sight words Reading Practice 1. A, C, T CAT C, A, T CAT I, AM, IS, A cat, a cat, Jat is a cat 2. B, F, H BAT, HAT, FAT BAT, HAT,
INTRODUCTION Lesson Phonics/ Diagraphs Read and Write Coloring Flashcards sight words Reading Practice 1. A, C, T CAT C, A, T CAT I, AM, IS, A cat, a cat, Jat is a cat 2. B, F, H BAT, HAT, FAT BAT, HAT,
Clicker Concepts: #1
 Clicker Concepts: #1 Dogs learn best through positive reinforcement Use lots of TINY yummy treats (cat treats, cheerios, hotdog pennies, bits of meat or cheese, etc.) Present new things in short, clear
Clicker Concepts: #1 Dogs learn best through positive reinforcement Use lots of TINY yummy treats (cat treats, cheerios, hotdog pennies, bits of meat or cheese, etc.) Present new things in short, clear
Our K9 LLC 616 Corporate Way Valley Cottage New York GARNET STATIC SHOCK BARK COLLAR USERS GUIDE
 Our K9 LLC 616 Corporate Way Valley Cottage New York 10898 GARNET STATIC SHOCK BARK COLLAR USERS GUIDE STATIC SHOCK BARK COLLAR Congratulations on buying this Our K9 Bark Collar, if for any reason you
Our K9 LLC 616 Corporate Way Valley Cottage New York 10898 GARNET STATIC SHOCK BARK COLLAR USERS GUIDE STATIC SHOCK BARK COLLAR Congratulations on buying this Our K9 Bark Collar, if for any reason you
Professional Ultrasonic Dog Whistle Guide
 Professional Ultrasonic Dog Whistle Guide Thank you for purchasing the MaxiPaws Ultrasonic Dog whistle. Please enjoy this free guide to help use your new whistle and make training your pup a breeze! First
Professional Ultrasonic Dog Whistle Guide Thank you for purchasing the MaxiPaws Ultrasonic Dog whistle. Please enjoy this free guide to help use your new whistle and make training your pup a breeze! First
Make Sense. Finding the way through sensory play. Dog Sense. See the world through Guide Dogs Eyes
 Make Sense Finding the way through sensory play Dog Sense See the world through Guide Dogs Eyes Make Sense Finding the way through sensory play Dog Sense Introduction to Dog Sense We all know about the
Make Sense Finding the way through sensory play Dog Sense See the world through Guide Dogs Eyes Make Sense Finding the way through sensory play Dog Sense Introduction to Dog Sense We all know about the
Please initial and date as your child has completely mastered reading each column.
 go the red don t help away three please look we big fast at see funny take run want its read me this but know here ride from she come in first let get will be how down for as all jump one blue make said
go the red don t help away three please look we big fast at see funny take run want its read me this but know here ride from she come in first let get will be how down for as all jump one blue make said
Reiki Healing for Cats
 Dear affiliate You are welcome to use the following article either as a webpage, blog post, as an email or any other formats. You may adapt either the layout and/or the wording as you feel appropriate.
Dear affiliate You are welcome to use the following article either as a webpage, blog post, as an email or any other formats. You may adapt either the layout and/or the wording as you feel appropriate.
Big Dogs Little Dogs
 Level 11 Book g Washed Away Inside Games Dragons Don t Eat Meat Written by Toni Hallett Level 11 Word Count 240 Text Type Information report High Frequency Word/s Introduced Ted and Lee s Book School Blog
Level 11 Book g Washed Away Inside Games Dragons Don t Eat Meat Written by Toni Hallett Level 11 Word Count 240 Text Type Information report High Frequency Word/s Introduced Ted and Lee s Book School Blog
Grade 5 English Language Arts
 What should good student writing at this grade level look like? The answer lies in the writing itself. The Writing Standards in Action Project uses high quality student writing samples to illustrate what
What should good student writing at this grade level look like? The answer lies in the writing itself. The Writing Standards in Action Project uses high quality student writing samples to illustrate what
Apple Training Series: AppleScript PDF
 Apple Training Series: AppleScript 1-2-3 PDF We know what youâ re thinking. Youâ ve heard about AppleScript. Youâ ve heard that it can do amazing things. Youâ ve heard that it can automate away the tiring,
Apple Training Series: AppleScript 1-2-3 PDF We know what youâ re thinking. Youâ ve heard about AppleScript. Youâ ve heard that it can do amazing things. Youâ ve heard that it can automate away the tiring,
Lab 5: Bumper Turtles
 Lab 5: Bumper Turtles min-pxcor = -16, max-pxcor = 16, min-pycor = -16, max-pycor = 16 The Bumper Turtles model created in this lab requires the use of Boolean logic and conditional control flow. The basic
Lab 5: Bumper Turtles min-pxcor = -16, max-pxcor = 16, min-pycor = -16, max-pycor = 16 The Bumper Turtles model created in this lab requires the use of Boolean logic and conditional control flow. The basic
Sheepdog: Alternative software-defined storage on your OpenStack cloud
 Sheepdog: Alternative software-defined storage on your OpenStack cloud Takashi Menjo NTT Software Innovation Center Sheepdog Agenda Introduction of Sheepdog What it is Performance
Sheepdog: Alternative software-defined storage on your OpenStack cloud Takashi Menjo NTT Software Innovation Center Sheepdog Agenda Introduction of Sheepdog What it is Performance
The ALife Zoo: cross-browser, platform-agnostic hosting of Artificial Life simulations
 The ALife Zoo: cross-browser, platform-agnostic hosting of Artificial Life simulations Simon Hickinbotham, Michael Weeks & James Austin University of York, Heslington, York YO1 5DD, UK email: sjh518@york.ac.uk
The ALife Zoo: cross-browser, platform-agnostic hosting of Artificial Life simulations Simon Hickinbotham, Michael Weeks & James Austin University of York, Heslington, York YO1 5DD, UK email: sjh518@york.ac.uk
8A READ-ALOUD. How Turtle Cracked His Shell. Lesson Objectives. Language Arts Objectives. Core Vocabulary
 8A READ-ALOUD How Turtle Cracked His Shell Lesson Objectives The following language arts objectives are addressed in this lesson. Objectives aligning with the Common Core State Standards are noted with
8A READ-ALOUD How Turtle Cracked His Shell Lesson Objectives The following language arts objectives are addressed in this lesson. Objectives aligning with the Common Core State Standards are noted with
Lesson Objectives. Core Content Objectives. Language Arts Objectives
 The Dog and the Manger 4 Lesson Objectives Core Content Objectives Students will: Demonstrate familiarity with The Dog in the Manger Identify character, plot, and setting as basic story elements Describe
The Dog and the Manger 4 Lesson Objectives Core Content Objectives Students will: Demonstrate familiarity with The Dog in the Manger Identify character, plot, and setting as basic story elements Describe
Teaching Assessment Lessons
 DOG TRAINER PROFESSIONAL Lesson 19 Teaching Assessment Lessons The lessons presented here reflect the skills and concepts that are included in the KPA beginner class curriculum (which is provided to all
DOG TRAINER PROFESSIONAL Lesson 19 Teaching Assessment Lessons The lessons presented here reflect the skills and concepts that are included in the KPA beginner class curriculum (which is provided to all
Clicker Training Guide
 Clicker Training Guide Thank you for choosing the PetSafe brand. Through consistent use of our products, you can have a better behaved dog in less time than with other training tools. If you have any questions,
Clicker Training Guide Thank you for choosing the PetSafe brand. Through consistent use of our products, you can have a better behaved dog in less time than with other training tools. If you have any questions,
Behavior Modification Reinforcement and Rewards
 21 Behavior Modification Reinforcement and Rewards The best way to train your pet is through the proper use of positive reinforcement and rewards while simultaneously avoiding punishment. The goal of training
21 Behavior Modification Reinforcement and Rewards The best way to train your pet is through the proper use of positive reinforcement and rewards while simultaneously avoiding punishment. The goal of training
Karen Pryor. Getting Started: Clicker Book. with Your Rabbit. Joan Orr and Teresa Lewin
 A Karen Pryor Getting Started: Clicker Book with Your Rabbit Joan Orr and Teresa Lewin Photo credits: B.U.N.S, Bunnies Urgently Needing Shelter, Santa Clara Humane Society, California: 1, 3, 7, 11, 15,
A Karen Pryor Getting Started: Clicker Book with Your Rabbit Joan Orr and Teresa Lewin Photo credits: B.U.N.S, Bunnies Urgently Needing Shelter, Santa Clara Humane Society, California: 1, 3, 7, 11, 15,
Trends and challenges in Engineering geodesy
 Trends and challenges in Engineering geodesy Rudolf STAIGER rudolf.staiger@hs-bochum.de International Federation of Surveyors Féderation Internationale des Géomètres Internationale Vereinigung der Vermessungsingenieure
Trends and challenges in Engineering geodesy Rudolf STAIGER rudolf.staiger@hs-bochum.de International Federation of Surveyors Féderation Internationale des Géomètres Internationale Vereinigung der Vermessungsingenieure
HOW TO INTRODUCE A NEW DOG TO YOUR CURRENT RESIDENT DOG
 HOW TO INTRODUCE A NEW DOG TO YOUR CURRENT RESIDENT DOG There are many reasons to introduce a dog to another dog, including an opportunity for temporary playtime permanent living arrangements Dogs, like
HOW TO INTRODUCE A NEW DOG TO YOUR CURRENT RESIDENT DOG There are many reasons to introduce a dog to another dog, including an opportunity for temporary playtime permanent living arrangements Dogs, like
JUDGES COMPETENCY FRAMEWORK
 Updated April 2018 Introducing JUDGES COMPETENCY FRAMEWORK Yulia Titovets / The Kennel Club WWW.THEKENNELCLUB.ORG.UK/JCF JUDGES COMPETENCY FRAMEWORK 2 To all Judges and Aspiring Judges A new system has
Updated April 2018 Introducing JUDGES COMPETENCY FRAMEWORK Yulia Titovets / The Kennel Club WWW.THEKENNELCLUB.ORG.UK/JCF JUDGES COMPETENCY FRAMEWORK 2 To all Judges and Aspiring Judges A new system has
Your Litter-Robot ships fully assembled. Follow these steps to get started and refer to the Instruction Manual for more information.
 QUICK START GUIDE LET S GET STARTED! Your Litter-Robot ships fully assembled. Follow these steps to get started and refer to the Instruction Manual for more information. Get to know the main components
QUICK START GUIDE LET S GET STARTED! Your Litter-Robot ships fully assembled. Follow these steps to get started and refer to the Instruction Manual for more information. Get to know the main components