Carsten Behn. Technical Mechanics Group Department of Mechanical Engineering Ilmenau University of Technology / Germany
|
|
|
- Isabel Austin
- 5 years ago
- Views:
Transcription

1 Carsten Behn Technical Mechanics Group Department of Mechanical Engineering Ilmenau University of Technology / Germany
2 Preface Outline Introduction - Motivation - Bionic aspects - Living paradigms - Anatomy Part II Vibrissae 1. Introduction 2. Functionality 3. Application 4. State of art 5. Modeling - Stages Multi-body Systems - Stage 5 - Continuous Systems 5a - Natural Frequencies 5b - Object Distance 5c - Object Contour 5d - Object Texture 5e - Flows Part I Mechanoreceptors 1. Inspiration from biology 2. Modeling 3. Scope, problem & goal 4. Mathematical model 5. Control strategies 6. Adaptors 7. Simulations 8. Experiments 9. Conclusions Overall conclusions Outlook Slide 01
3 Introduction Motivation Main Focus / Aim: Tactile sensing of environmental information Approach: Inspiration from Biology Animal Vibrissae Transfer Functionalities to Engineering: BIONICS Analytical Treatment / Simulation / Prototypes Slide 02
4 Introduction Bionic aspects 1. analyzing live biological systems, e.g. vibrissae, 2. quantifying the mechanical and environmental behavior: identifying and quantifying mechanosensitive responses (e.g., pressure, vibrations) and their mechanisms as adaptation, 3. modeling live paradigms with basic features developed before, 4. exploiting corresponding mathematical models in order to understand details of internal processes and, 5. coming to artificial prototypes (e.g., sensors in robotics), which exhibit features of the real paradigms. Important: - focus is not on copying the solution from biology / animality - not to construct prototypes with one-to-one properties of, e.g., a vibrissa Slide 03



 and conical")
5 Introduction Living paradigms Different names: vibrissa, whisker, tactile hair, sensory hair, sensillum,... [www] variability in length, diameter, shape (curvature) and conical structure Slide 04

6 Introduction Living paradigms Tactile sensing of environmental informations - complex tactile sensory organ: sense of vibrations - near field -sense in contrast to far field -senses (e.g., vision) - tactile hairs / vibrissae in the region around the snoot: mystacial vibrissae - vibrissa is used as lever for force transmission - found in nocturnal / non-visual animals (best developed in rodents e.g. rats) Slide 05
7 Introduction Anatomy of vibrissae [Carl et. al. 2012b] two components: sinus hair and own hair follicle elastical, hollow and Follicle-Sinus-Complex (FSC), conically shaped Part II blood vessels and nerves (mechanoreceptors) viscoelastic support Part I Slide 06
 with blood vessels, nerves and mechanoreceptors (right side) - Detection of")
8 Part I: Mechanoreceptors 1. Inspiration from biology Mechanoreceptors of sensory hair systems: - Follicle-Sinus-Complex (FSC) with blood vessels, nerves and mechanoreceptors (right side) - Detection of vibrissa displacements by mechanoreceptors in the FSC - Receptors have only one function: transduce a (mechanical) stimulus to neural impulses Slide 07
9 Part I: Mechanoreceptors 1. Inspiration from biology - a receptor never continues to respond to a non-changing stimulus in transducing impulses to the CNS - the neuron s reaction is controlled: is being suppressed, enhanced or left unaltered - hence, depending on the stimulus, a receptor offers a rapid and brief response; then, this response declines if the stimulus is un-changing (stimulus is damped, is considered irrelevant once it has been perceived) Slide 08
10 Part I: Mechanoreceptors 1. Inspiration from biology - sensibility of FA-receptor-cells is continuously adjusted in such a way that the whole systems tends to its rest position despite a continued excitation - waiting / sensitive for new stimulus - due to permanently changing environment the receptor has to be in a permanent state of adaptation - Example: think of a cat - exposed to wind - this stimulus is perceived and damped (irrelevant) - cat encounters obstacle, receptor should perceive this sudden deviation of the whiskers, while wind persists enduring sensitivity Slide 09
11 Part I: Mechanoreceptors 2. Modeling Perception Unit / Sensor Transduction Unit Processing Unit Development of new measuring and monitoring systems Alarm / Alert - Adjustment and adaptation of its sensitiviy to the environment - obvious: unknown surroundings treatment of uncertain systems: How to design an effective processing unit? Slide 10

 y(t) m c u(t)")
12 Part I: Mechanoreceptors 2. Modeling Receptor model: d - linear spring-mass-damper-system within a rigid frame - forced by an unknown time-dependent displacement - adjustment: assuming control force acting on inner mass x(t) y(t) m c u(t) -u(t) in relative coordinate measured output as the a(t) Slide 11
13 Part I: Mechanoreceptors 3. Scope, problem & goal Scope: - achieve a predefined movement of the receptor mass as stabilization of the sensor system or tracking of a reference trajectory - sole possibility: control force - find a suitable control strategy to reproduce the specialities of the biological system - compensate unknown ground excitations Problem: - many open-loop and closed-loop controls are based on exactly known parameters - here: highly uncertain control system (due to biological complexity) - unknown external perturbation - unknown system parameters - only structural properties known What to do if the system is not known precisely? Slide 12
14 Part I: Mechanoreceptors 3. Scope, problem & goal Goal: Design an adaptive controller, which learns from the behavior of the system, so automatically adjusts its parameters and achieves - tracking (not exact tracking) (i) every solution of the closed-loop system is defined and bounded, (ii) the output tracks the given reference signal with asymptotic accuracy. Requirements: - ability to apply controllers without knowledge about system parameters - simple feedback / controller structure - small level of gain parameters, level of error inside the tube - ability to quickly adapt to parameter changes Slide 13

15 Part I: Mechanoreceptors 4. Mathematical model General System Class: Properties: Slide 14


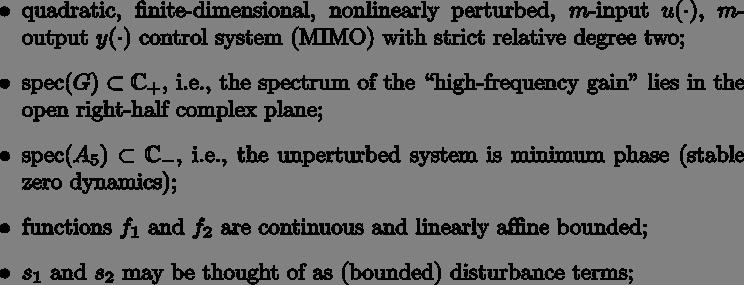
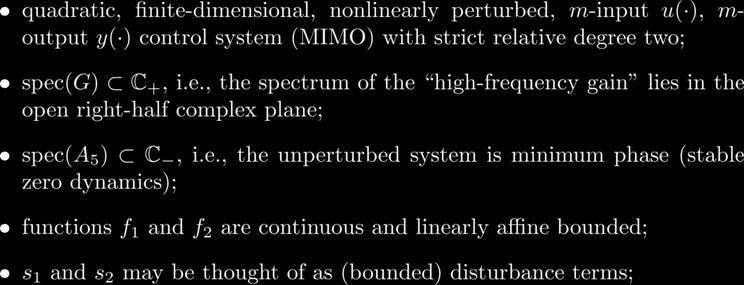
16 Part I: Mechanoreceptors 4. Mathematical model Special System Subclass: restriction Properties: Slide 14



 Works for")


17 Part I: Mechanoreceptors 5. Control strategies Modified from literature, high-gain controllers: Controller 1: (using the derivative of the output) Works for general class, proven 2006 Controller 2: (includes a dynamic compensator, no derivative measurement) Works for general class, proven 2011 Controller 3: (controller of order 1, P-structure) Works only for special subclass, proven 2013, not extendable to MIMO Slide 15
18 Part I: Mechanoreceptors 5. Control strategies Slide 16
19 Part I: Mechanoreceptors 6. Adaptors Problems - stabilization and tracking are guaranteed / proven - slow convergence of controller gain: introducing new parameter - this parameter strongly determines the growth of the gain parameter (sufficiently large enough) - Example: soliton excitation peak at t=20.5: Slide 17
20 Part I: Mechanoreceptors 6. Adaptors - high gain values, still stays constant although control objective is achieved - arrive also at high feedback values - furthermore: system is now not really sensitive to notice other impulses (see t=20.5) Slide 18
21 Part I: Mechanoreceptors 6. Adaptors - closed-loop system is getting insensitive for changes of the stimulus - caused by only monotonic increase of the gain parameter (classical adaptor) - also do almost all controllers existing in the literature k,e k(t) k* e(t) t k,e k(t) Aim: Also: What about limited resources in applications? k* e(t) t Slide 19
22 Part I: Mechanoreceptors 6. Adaptors Attempt 1: so-called sigma-modification (in the literature): - this adaptor achieves damping and increase of the gain k simultaneously when e is outside the tube - this law (often) leads to chaotic behavior of the system Attempt 2: first simple modification: - also showing alternating increase and exponential decrease of k - Problem: It could happen that e rapidly traverses the tube. Then it would be inadequate to immediately decrease k after e entered the tube. Slide 20



23 Part I: Mechanoreceptors 6. Adaptors Attempt 3: Distinguishing three cases: 1. increasing k while e is outside the tube, 2. constant k after e entered the tube - no longer than a pre-specified duration of stay, 3. decreasing k after this duration has been exceeded: Attempt 4: In order to make the attraction of the tube stronger using different exponents for large/small distance from the tube: Slide 21


24 Part I: Mechanoreceptors 6. Adaptors Attempt 5: One way to guarantee that e will not leave the tube after entering the tube and k is going to be decreased, is tracking of a smaller value than the desired one, for example : - turns out as the to-be-favoured one - safe tracking Slide 22


25 Part I: Mechanoreceptors 7. Simulations - adaptive nature: arbitrary choice of the system parameters - obvious (for numerical simulation) to choose system data fixed and known, but controllers adjust their gain parameter to each set of system data - parameters: arbitrarily chosen, not measured, not identified from biological paradigm Slide 23
26 Part I: Mechanoreceptors 7. Simulations Output, tubes vs. t Gain parameter vs. t Slide 24
27 Part I: Mechanoreceptors 7. Simulations Output, tubes vs. t Gain parameter vs. t Slide 25
28 Part I: Mechanoreceptors 7. Simulations Output, tubes vs. t Gain parameter vs. t - no apparantly leaving of the -tube as before - steep increase of is due to switching on the controller Slide 26
29 Part I: Mechanoreceptors 7. Simulations Gain parameter vs. t Gain parameter reflects the behavior of the biological paradigm Slide 27


30 Part I: Mechanoreceptors 8. Experiments demonstrator in form of an electrical oscillating circuit Test rig: 1 - I/O-system (BNC-2110), 2 - DAQ-6036-PCMCIA-card, 3 - demonstrator, 4 - PC with LabView Circuit: 1 - capacitor, 2 - resistor, 3 - one inductor (overall inductance ), 4 - communication to PC Slide 28


31 Part I: Mechanoreceptors 8. Experiments Equations of motion: Goal: adaptively compensating changes of by means of control input Control input: (directly control the capacity voltage, depends linearly on measured output charge ) Parameters: Slide 29
32 Part I: Mechanoreceptors 8. Experiments Slide 30 Control panel in LabView

33 Part I: Mechanoreceptors 8. Experiments Control panel in LabView - The capacitor voltage never leaves the tube - Adaptor works effectively - Behavior of the receptor cell Slide 30
34 Part I: Mechanoreceptors 9. Conclusions - Development of new control strategies and sensor models - Motivated by a sensory hair receptor: permanent state of adaptation - Behavior mimicked by an artificial sensor system via adaptive control - Supposed high degree of unknown system parameters - Adaptive control design to dominate an uncertain system with improved gain parameter models with minimal knowledge of system parameters - Simple control design: rely only on structural properties, do not invoke any estimation or identification mechanism, do not depend on output derivative - Numerical simulations and experiments have shown that the proposed controller exhibit both sensibility and adaptivity. - The receptor model rapidly suppresses the persisting stimuli and shows good reactions to sudden changes in the stimulus. Slide 31
 [Carl et. al.")
![2012b] two components: sinus hair and own](/docs-images/85/91341905/images/35-2.jpg "hair follicle elastical, hollow and")

35 Part II: Vibrissae 1. Introduction (Anatomy) [Carl et. al. 2012b] two components: sinus hair and own hair follicle elastical, hollow and Follicle-Sinus-Complex (FSC), conically shaped Part II blood vessels and nerves (mechanoreceptors) viscoelastic support Slide 32
36 Part II: Vibrissae 1. Introduction (Anatomy) Slide 33 [D. Voges, TUI, 2012]
37 Part II: Vibrissae 2. Functionality Mode 1 of operation: - passive mode - waiting for impulses (caused by wind) - vibrissa passively returns to rest position Slide 34
38 Part II: Vibrissae 2. Functionality Mode 2 of operation: - active mode - actively moved through alternate contractions of musculature - caused scanning / whisking of objects and surfaces Slide 35
39 Part II: Vibrissae 2. Functionality / control strategies Offering the ability to adapt its sensitivity to its environment: - detection of vibrissa displacements by mechanoreceptors in the FSC - a feedback loop (closed-loop control system) enables the rodents to immediately react to an object contact: they slow down the vibrissae - depending on the mode (passive or active) and the expectations, the neuron s reaction is controlled: is being suppressed, enhanced or left unaltered - the rodents can probably modify the stiffness of the vibrissa support by varying the pressure in the blood-sinus - active whisking pattern a) exploratory whisking: large amplitudes, low frequency (5-15Hz) b) foveal whisking: small amplitudes, high frequency (15-25Hz) Slide 36
40 Part II: Vibrissae 2. Functionality / control strategies still unclear: How the animals convert these multiple contacts with single objects into coherent information about their surroundings? But: highly interesting sensory system (autonomous robotics, reliable information in dark, smoky or noisy environments) Slide 37
41 Part II: Vibrissae 3. Application Paradigms of tactile sensors for perceptions in applications: quality assurance (e.g., coordinate measuring machines) measurements of flow rates detection of packaged goods on conveyor belts Microsystem Technology G. Krijinen Robotics detection of flow rates V. DürrD object localization M. Fend detection of texture detection of surfaces Slide 38

42 Part II: Vibrissae 4. State of Art Rigid body models Rigid body model of a vibrissa / vibrissa row with musculature in [Berg, Kleinfeld 2003] and [Hill et. al. 2008] Slide 39

43 Part II: Vibrissae 4. State of Art Rigid body models Rigid body model of the vibrissa / Simulating the compliance of the FSC in [Mitchinson et. al. 2004], [Mitchinson et. al. 2007] Slide 40

44 Part II: Vibrissae 4. State of Art Rigid body models Rigid body model of a vibrissa for determination of the range of movement of the vibrissa in [Berg, Kleinfeld 2003] Slide 41
![Part II: Vibrissae 4. State of Art Rigid body models Biomechanical model representing one vibrissal row in [Haidarliu et al. 2010] and [Haidarliu et al.](/docs-images/85/91341905/images/45-0.jpg "2011] Goal: modeling the muscle-tissue-system in the mystacial pad just for illustration, model is too complex to investigate control algorithm, no focus")
45 Part II: Vibrissae 4. State of Art Rigid body models Biomechanical model representing one vibrissal row in [Haidarliu et al. 2010] and [Haidarliu et al. 2011] Goal: modeling the muscle-tissue-system in the mystacial pad just for illustration, model is too complex to investigate control algorithm, no focus Slide 42

46 Part II: Vibrissae 4. State of Art Continuum models Analyzing the bending behavior of natural vibrissae using beams in [Birdwell et. al. 2007] Non-linear Linearized non-linear (solid) vs. linearized (dashed) cylindrical (blue) vs. conical (red) Slide 43
47 Part II: Vibrissae 4. State of Art Continuum models Determination of various vibrissa parameters using the bending behavior in [Birdwell et. al. 2007] heuristically determined parameters of various vibrissae: - simulated bending behavior of beams - photos of deformed vibrissa - varying Young s modulus if graphs do not match Slide 44
48 Part II: Vibrissae 4. State of Art Continuum models Investigating the influence of the vibrissa's shape to the bending behavior in [Carl 2009] and [Carl et. al. 2012a] Slide 45

49 Part II: Vibrissae 4. State of Art Continuum models Model for active sensing in [Scholz, Rahn 2004] Neglecting support s compliance Slide 46

50 Part II: Vibrissae 4. State of Art Continuum models Model to determine the influence of the support on the eigenfrequencies in [Neimark et. al. 2003] and [Andermann et. al. 2004] - infra-red measurements of the first eigenfrequency (EF) of various natural vibrissae connection between first EF and length of vibrissa (length increase, EF decrease) hence systematical arrangement topologically distributed sensitivity in the vibrissa array - mechanical model of a thin, conical beam and present dynamical investigations (massive influence of the support on the EF obvious) - but: determination only of the first EF of the vibrissae focus on supports which do not match the real objects sufficiently Slide 47
51 Part II: Vibrissae 5. Modeling Stage 1 Single vibrissa system with DoF=1 [Barth 2004] Slide 48

52 Part II: Vibrissae 5. Modeling Stage 1 Single vibrissa system with DoF=1 physiological pivot point torque due to musculature, serves as control [Barth 2004] elasticity / compliance of the FSC Slide 48
53 Part II: Vibrissae 5. Modeling Stage 1 Goal: Control the vibrissa system in a chosen mode of operation: passive or active Problem: - many open-loop and closed-loop controls are based on exactly known parameters - here: suppose uncertain system (due to biological complexity) - unknown system parameters - only structural properties known What to do if the system is not known precisely? Solution: Design an adaptive controller, which learns from the behavior of the system, so automatically adjusts its parameters and achieves -tracking Slide 49
54 Part II: Vibrissae 5. Modeling Stage 1 Passive Mode - stabilize the system under permanent excitation - while enabling to detect external extra-perturbations (e.g. sensory contact, detect wake of swimming fish) -stabilization Slide 50


55 Part II: Vibrissae 5. Modeling Stage 1 Active Mode - track an internally generated oscillatory motion pattern - enable the system to recognize external disturbances of this pattern (caused, e.g., by wind or surface contact scanning of surface texture) -tracking Slide 51
56 Part II: Vibrissae 5. Modeling Stage 1 Simulations vibrissa: environment: (small permanent oscillation with a gust of wind) modes of operation: passive mode active mode 1 exploratory whisking active mode 2 foveal whisking Slide 52
57 Part II: Vibrissae 5. Modeling Stage 1 Active Mode 1 Error vs. time Gain vs. time Control torque vs. time - good tracking - convergence of the gain - hard to detect the gust in system variables e and k - control torque reflects peak Slide 53
58 Part II: Vibrissae 5. Modeling Stage 1 Active Mode 1 Error vs. time Gain vs. time - good tracking - control as before - detect superimposed impulse in observing k Slide 54
59 Part II: Vibrissae 5. Modeling Stage 1 Short summary: - adaptive control is promising in application to vibrissa systems - it allows for both modes of operation (passive or active) - not easy to detect solitary excitations - somestimes observe e, k or control input - some identification techniques to uniformly observe one observable which one? - Stage 2: seperate extra receptor from vibrissa system, as in paradigm Slide 55
60 Part II: Vibrissae 5. Modeling Stage 2 First perception: external excitations deflect the vibrissa, it serves as a perception of vibrations Slide 56
61 Part II: Vibrissae 5. Modeling Stage 2 Second - transduction: control the blood supply to achieve passive/active mode, information about the needed supply transmitted to receptor cells Slide 56
62 Part II: Vibrissae 5. Modeling Stage 2 Third processing: information analyzed in a receptor cell in such a way to identify some important information about the excitation Slide 56
63 Part II: Vibrissae 5. Modeling Stage 2 environment: controller: reference signals for modes: Passive Mode Error Output of vibrissa Receptor gain Slide 57
64 Part II: Vibrissae 5. Modeling Stage 2 Active Mode Output of vibrissa transmitted torque signal Receptor Gain - both adaptive controllers work (for vibrissa and receptor) - transmitted torque is analyzed in the receptor - interesting: detect superimposed impulse in observing receptor gain k(.) Slide 58
65 Part II: Vibrissae 5. Modeling Stage 2 Short summary: - numerical simulations have shown that this system exhibit also sensibility and adaptivity - the vibrissa system reacts well to numerous forces - disturbing forces can clearly be recognized in observing the course of the control torque suitable observable as input to receptor model - the receptor model rapidly suppresses the persisting stimuli and shows good reactions to sudden deflections - main outcome: the output of the receptor y, k or u is simultanously immanent in the control torque! further investigations will focus on the perception model - Drawback: perception of horizontal forces only - New goal: models for identification of disturbing forces with a larger range of angles of attack Slide 59
66 Part II: Vibrissae 5. Modeling Stage 3 Single rigid body, DoF>1 [Schmitz, Behn 2011] Slide 60
67 Part II: Vibrissae 5. Modeling Stage 3 Equations of motion for Model 2B Slide 61
68 Part II: Vibrissae 5. Modeling Stage 3 Slide 62
69 Part II: Vibrissae 5. Modeling Stage 3 Slide 63
70 Part II: Vibrissae 5. Modeling Stage 3 Goal: identification of disturbing forces attacking with any angle Results: with model 2B disturbance forces can be identified in the passive and active mode for angles of attack reaching from to increase elasticity, possible in 2 ways: a) rigid multi-body system models Stage 4 b) elastic beam models: investigation of mechanical models with infinte DoF Stage 5 DOF=1 DOF=3 DOF=infinity Slide 64
71 Part II: Vibrissae 5. Modeling Stage 5 Remind: Vibrissa is elastical, hollow and conically shaped Function hypotheses in literature: - The elasticity and the conical shape of the hair are relevant for the functionality of the vibrissa. - The viscoelastic properties of the support (FSC) are controlled by the blood pressure in the blood sinus. - The vibrissae are excited with or close to their resonance frequencies during the active mode. Global goal: - computation of EFs for dimensioning and / or parameter identification (e.g., external forces) - maybe observing shift of the spectrum of EFs (due to controllable FSC) Slide 65
72 Part II: Vibrissae 5. Modeling Stage 5a - EF Intermediate goals: - investigating innovative models of a flexible vibrissa with a viscoelastic support (discrete or continuously distributed) - analytical computation of EFs of beams depending on material and geometry - numerical verification using FEM / MBS - drawing conclusion to complex systems Slide 66
73 Part II: Vibrissae 5. Modeling Stage 5a - EF Example: PDE: BC: EVE: Results: Slide 67
74 Part II: Vibrissae 5. Modeling Stage 5a - EF First steps: conservative systems Modeling: - one and two levels of support compliance: FSC and skin Drawback: - pivot does not match reality - no damping is considered Findings (obvious as in literature): - massive influence of the support on the eigenfrequencies - massive influence of the conical and hollow shape Slide 68
75 Part II: Vibrissae 5. Modeling Stage 5a - EF Investigating the influence of fundamental properties of the vibrissa from biology to the natural frequencies: - conical shape / various cross-sections - viscoelastic foundation due to FSC - discrete viscoelastic support due to skin - bearing due to (sudden) object contact Slide 69
76 Part II: Vibrissae 5. Modeling Stage 5a - EF Next steps: non-conservative systems skin FSC at first: free end, but three beam sections! 12 boundary condition MVR EVE (analytically) EV & NF (numerically) Slide 70
77 Part II: Vibrissae 5. Modeling Stage 5a - EF Parameters of B2-vibrissa in [Neimark et. al. 2003] Slide 71
78 Part II: Vibrissae 5. Modeling Stage 5a - EF as expected unlike behavior: increasing natural frequencies if damped Slide 72
79 Part II: Vibrissae 5. Modeling Stage 5a - EF Analyze simple systems to understand effects of boundary damping Slide 73
80 Part II: Vibrissae 5. Modeling Stage 5a - EF Simplification: model to analyze discrete damping effects boundary viscoelastic end-support Boundary conditions: 4-th boundary condition in form of a differential equation! manipulation of this equation Slide 74
81 Part II: Vibrissae 5. Modeling Stage 5a - EF final form of 4th equation: matrix of the matrix-vector-representation: Slide 75
82 Part II: Vibrissae 5. Modeling Stage 5a - EF Equation to determine the eigenvalues: First test: equation exhibits known eigenvalue-equations of the following systems and or Introduction of dimensionless parameters: Slide 76
83 Part II: Vibrissae 5. Modeling Stage 5a - EF Determination using MAPLE: Slide 77


84 Part II: Vibrissae 5. Modeling Stage 5a - EF Verification ANSYS: first natural frequency dependent on with parameter (using beam3 and combine14) Slide 78
85 Part II: Vibrissae 5. Modeling Stage 5a - EF Slide 79
86 Part II: Vibrissae 5. Modeling Stage 5a - EF Slide 79
87 Part II: Vibrissae 5. Modeling Stage 5a - EF This curve explains the mentioned unlike behavior of natural frequencies. Slide 79

88 Part II: Vibrissae 5. Modeling Stage 5a - EF More complex and unlike behavior in observing the second (or other higher) natural frequencies: Slide 80


89 Part II: Vibrissae 5. Modeling Stage 5a - EF Existence of saddle points: Slide 81
90 Part II: Vibrissae 5. Modeling Stage 5a - EF Conclusion from this stage: - analytical treatment of beam vibrations to determine the spectrum of natural frequencies - complex models due to complex structure of biological sensor - unlike behavior in first models - analysis of a special example: - boundary discrete damping and spring elements - classical assertions not valid: increase c then natural frequency will increase - this may explain the unlike behavior - 0-eigenfrequency rigid-body motion, like strong damping, no oscillation - still known, but not for beams - idea: observe shift in spectrum of frequencies due to sudden obstacle contacts detect distance, not only contact / no contact Slide 82
91 Part II: Vibrissae 5. Modeling Stage 5b - Distance paradigms of tactile sensors for perception in applications: Microsystem Technology quality assurance (e.g., coordinate measuring machines) measurements of flow rates detection of packaged goods on conveyor belts Robotics G. Krijinen detection of flow rates V. Dürr object localization M. Fend detection of texture dynamic analysis of beam vibrations in Bionics detection of contour Slide 83




92 Part II: Vibrissae 5. Modeling Stage 5b - Distance [Ueno et al. 1998] model of the vibrissa l L object contact is modeled as a bearing boundary and transition conditions: Slide 84
93 Part II: Vibrissae 5. Modeling Stage 5b - Distance [Ueno et al. 1998] first three natural frequencies first vs. second natural frequency determination of the contact point with the first natural frequency is not possible determination of the contact point with the first two natural frequencies is quite hard Slide 85

94 Part II: Vibrissae 5. Modeling Stage 5b - Distance Modeling Model A Model B Model C Slide 86
95 Part II: Vibrissae 5. Modeling Stage 5b - Distance Investigations Only conservative systems due to problems presented before! Slide 87
96 Part II: Vibrissae 5. Modeling Stage 5b - Distance Conclusion from this stage: - focus on dynamical analysis of vibrissa-like beams for obstacle distance detection - development of several vibrissa-like beams which supports match better the real biological conditions - idea: investigations of each eigenvalue spectrum - development: - possibility to expand the eigenvalues curve with the discrete spring - determination of the contact point by means of two algorithms - very first experiments show the effectiveness of the algorithms To be done: - investigation of models with different cross-sections, pre-curvature, non-conservative - improve experiments Slide 88
97 Part II: Vibrissae 5. Modeling Stage 5c - Contour Paradigms of tactile sensors for perception in applications: quality assurance (e.g., coordinate measuring machines) measurements of flow rates detection of packaged goods on conveyor belts Microsystem Technology Robotics G. Krijinen detection of flow rates V. Dürr object localization M. Fend detection of texture large deflection of beams in Bionics detection of contour Slide 89
98 Part II: Vibrissae 5. Modeling Stage 5c - Contour State of art - most works focus on numerics from the beginning [Scholz, Rahn 2004] object fits in the field of computed vibrissae Slide 90
99 Part II: Vibrissae 5. Modeling Stage 5c - Contour State of art - BVP-solvers are used [Hires et al. 2013] - linear theory is used [Birdwell et al. 2007] - rigid body systems are used as an approximation [Quist, Hartmann 2012] [Birdwell et al. 2007] - also finite differences [Pammer et al. 2013] and others are used [Kim, Möller 2007] - no analytical treatment, skipping beam theories at early stages [Kim, Möller 2007] Slide 91

100 Part II: Vibrissae 5. Modeling Stage 5c - Contour obstacle obstacle vibrissa contact point modeling contact point technical vibrissa measurement unit at the base / clamping FSC Slide 92
101 Part II: Vibrissae 5. Modeling Stage 5c - Contour Assumptions on Contour: smooth, strictly convex ideal contact, i.e., contact force perpendicular to profile contour no friction taken into account Assumptions on Vibrissa: straight beam (no pre-curvature) constant 2 nd moment of area constant Young s modulus E Hooke s law of linear elasticity ignoring shear stress Euler-Bernoulli theory for large deflections support at base: clamping obstacle contact point technical vibrissa measurement unit at the base / clamping Slide 93
102 Part II: Vibrissae 5. Modeling Stage 5c - Contour Conclusions from this stage: -analytical treatment of large deflections of beams -generation of observables possible for strictly convex surfaces -sweep has to be divided into two phases -new insights: - decision criterion for actual phase, decreases computations - contact point computation - no approximation of the problem - profile contour reconstruction possible with one sweep -reconstruction with previously computed observables: error within 10-6 To be done: - verification by an experiment - include pre-curvature, conicity of the beam Presentation on Monday Session: Intelli 1 Slide 94


 measurements of flow")

103 Part II: Vibrissae 5. Modeling Stage 5d - Texture Paradigms of tactile sensors for perception in applications: Microsystem Technology quality assurance (e.g., coordinate measuring machines) measurements of flow rates detection of packaged goods on conveyor belts Robotics G. Krijinen detection of flow rates V. Dürr object localization M. Fend detection of texture Presentation on Monday Sesssion: Intelli 2 detection of contour Slide 95
104 Overall conclusions Slide 96
Mechanical signals at the base of a rat vibrissa: the effect of intrinsic vibrissa curvature and implications for tactile exploration
 Mechanical signals at the base of a rat vibrissa: the effect of intrinsic vibrissa curvature and implications for tactile exploration Brian W. Quist and Mitra J. Z. Hartmann J Neurophysiol 107:2298-2312,
Mechanical signals at the base of a rat vibrissa: the effect of intrinsic vibrissa curvature and implications for tactile exploration Brian W. Quist and Mitra J. Z. Hartmann J Neurophysiol 107:2298-2312,
Active sensing. Ehud Ahissar
 Active sensing Ehud Ahissar 1 Active sensing Passive vs active sensing (touch) Comparison across senses Basic coding principles -------- Perceptual loops Sensation-targeted motor control Proprioception
Active sensing Ehud Ahissar 1 Active sensing Passive vs active sensing (touch) Comparison across senses Basic coding principles -------- Perceptual loops Sensation-targeted motor control Proprioception
Mechanical Characteristics of Rat Vibrissae: Resonant Frequencies and Damping in Isolated Whiskers and in the Awake Behaving Animal
 6510 The Journal of Neuroscience, July 23, 2003 23(16):6510 6519 Behavioral/Systems/Cognitive Mechanical Characteristics of Rat Vibrissae: Resonant Frequencies and Damping in Isolated Whiskers and in the
6510 The Journal of Neuroscience, July 23, 2003 23(16):6510 6519 Behavioral/Systems/Cognitive Mechanical Characteristics of Rat Vibrissae: Resonant Frequencies and Damping in Isolated Whiskers and in the
Chapter VII Non-linear SSI analysis of Structure-Isolated footings -soil system
 Chapter VII 192 7.1. Introduction Chapter VII Non-linear SSI analysis of Structure-Isolated footings -soil system A program NLSSI-F has been developed, using FORTRAN, to conduct non-linear soilstructure
Chapter VII 192 7.1. Introduction Chapter VII Non-linear SSI analysis of Structure-Isolated footings -soil system A program NLSSI-F has been developed, using FORTRAN, to conduct non-linear soilstructure
Embodied Information Processing: Vibrissa Mechanics and Texture Features Shape Micromotions in Actively Sensing Rats
 Article Embodied Information Processing: Vibrissa Mechanics and Texture Features Shape Micromotions in Actively Sensing Rats Jason T. Ritt, 1 Mark L. Andermann, 2 and Christopher I. Moore 1, * 1 McGovern
Article Embodied Information Processing: Vibrissa Mechanics and Texture Features Shape Micromotions in Actively Sensing Rats Jason T. Ritt, 1 Mark L. Andermann, 2 and Christopher I. Moore 1, * 1 McGovern
Modeling and Control of Trawl Systems
 Modeling and Control of Trawl Systems Karl-Johan Reite, SINTEF Fisheries and Aquaculture Supervisor: Professor A. J. Sørensen * Advisor: Professor H. Ellingsen * * Norwegian University of Science and Technology
Modeling and Control of Trawl Systems Karl-Johan Reite, SINTEF Fisheries and Aquaculture Supervisor: Professor A. J. Sørensen * Advisor: Professor H. Ellingsen * * Norwegian University of Science and Technology
Chapter 6. Dynamic. 6.1 Introduction. 6.2 Case Study/Engineering Application
 Chapter Dynamic. Introduction In the last chapters, we have discussed the static analysis of structures. Static analysis holds when the loads are slowly applied. When the loads are suddenly applied, or
Chapter Dynamic. Introduction In the last chapters, we have discussed the static analysis of structures. Static analysis holds when the loads are slowly applied. When the loads are suddenly applied, or
Using Physics for Motion Retargeting
 Thesis Submitted to Utrecht University for the degree of Master of Science Supervisor: drs. Arno Kamphuis INF/SCR-10-13 Utrecht University Department of Computer Science MSc Program: Game and Media Technology
Thesis Submitted to Utrecht University for the degree of Master of Science Supervisor: drs. Arno Kamphuis INF/SCR-10-13 Utrecht University Department of Computer Science MSc Program: Game and Media Technology
ROUGH TERRAIN CRANE GR-120NL GR-120N
 ROUGH TERRAIN CRANE GR-120NL GR-120N (Standard Jib) JAPANESE SPECIFICATIONS CARRIER MODEL OUTLINE SPEC. NO. GR-120NL 12 t hook X-type Outrigger GR-120N-2-00101 GR-120NL 12 t hook H-type Outrigger GR-120N-2-00102
ROUGH TERRAIN CRANE GR-120NL GR-120N (Standard Jib) JAPANESE SPECIFICATIONS CARRIER MODEL OUTLINE SPEC. NO. GR-120NL 12 t hook X-type Outrigger GR-120N-2-00101 GR-120NL 12 t hook H-type Outrigger GR-120N-2-00102
The Advantages of a Tapered Whisker
 The Advantages of a Tapered Whisker Christopher M. Williams, Eric M. Kramer* Physics Department, Bard College at Simon s Rock, Great Barrington, Massachusetts, United States of America Abstract The role
The Advantages of a Tapered Whisker Christopher M. Williams, Eric M. Kramer* Physics Department, Bard College at Simon s Rock, Great Barrington, Massachusetts, United States of America Abstract The role
The search space of the rat during whisking behavior
 214. Published by The Company of iologists Ltd (214) 217, 3365-3376 doi:1.1242/jeb.15338 RESERCH RTICLE The search space of the rat during whisking behavior Lucie. Huet 1 and Mitra J. Z. Hartmann 1,2,
214. Published by The Company of iologists Ltd (214) 217, 3365-3376 doi:1.1242/jeb.15338 RESERCH RTICLE The search space of the rat during whisking behavior Lucie. Huet 1 and Mitra J. Z. Hartmann 1,2,
IQ Range. Electrical Data 3-Phase Power Supplies. Keeping the World Flowing
 IQ Range Electrical Data 3-Phase Power Supplies Keeping the World Flowing Contents Section Page Introduction 3 50 Hz 380 V 5 0 V 6 415 V 7 4 V 8 500 V 9 6 V 60 Hz 8 V 11 2 V 0 V 13 4 V 14 460 V 15 480
IQ Range Electrical Data 3-Phase Power Supplies Keeping the World Flowing Contents Section Page Introduction 3 50 Hz 380 V 5 0 V 6 415 V 7 4 V 8 500 V 9 6 V 60 Hz 8 V 11 2 V 0 V 13 4 V 14 460 V 15 480
A Biomimetic Haptic Sensor
 A Biomimetic Haptic Sensor Martin J. Pearson, Ian Gilhespy, Chris Melhuish, Ben Mitchinson, Mokhtar Nibouche, Anthony G. Pipe, Tony J. Prescott Intelligent Autonomous Systems laboratory, University of
A Biomimetic Haptic Sensor Martin J. Pearson, Ian Gilhespy, Chris Melhuish, Ben Mitchinson, Mokhtar Nibouche, Anthony G. Pipe, Tony J. Prescott Intelligent Autonomous Systems laboratory, University of
Improved Photoacoustic Generator
 Int J Thermophys (2014) 35:2302 2307 DOI 10.1007/s10765-014-1751-9 Improved Photoacoustic Generator T. Borowski A. Burd M. Suchenek T. Starecki Received: 17 November 2013 / Accepted: 23 September 2014
Int J Thermophys (2014) 35:2302 2307 DOI 10.1007/s10765-014-1751-9 Improved Photoacoustic Generator T. Borowski A. Burd M. Suchenek T. Starecki Received: 17 November 2013 / Accepted: 23 September 2014
University of Pennsylvania. From Perception and Reasoning to Grasping
 University of Pennsylvania GRASP LAB PR2GRASP: From Perception and Reasoning to Grasping Led by Maxim Likhachev Kostas Daniilides Vijay Kumar Katherine J. Kuchenbecker Jianbo Shi Daniel D. Lee Mark Yim
University of Pennsylvania GRASP LAB PR2GRASP: From Perception and Reasoning to Grasping Led by Maxim Likhachev Kostas Daniilides Vijay Kumar Katherine J. Kuchenbecker Jianbo Shi Daniel D. Lee Mark Yim
A night in the life of a rat: vibrissal mechanics and tactile exploration
 Ann. N.Y. Acad. Sci. ISSN 0077-8923 ANNALS OF THE NEW YORK ACADEMY OF SCIENCES Issue: New Perspectives on Neurobehavioral Evolution A night in the life of a rat: vibrissal mechanics and tactile exploration
Ann. N.Y. Acad. Sci. ISSN 0077-8923 ANNALS OF THE NEW YORK ACADEMY OF SCIENCES Issue: New Perspectives on Neurobehavioral Evolution A night in the life of a rat: vibrissal mechanics and tactile exploration
ENGINEERING TEST SPECIFICATION
 DATE PREPARED CREATED BY DATE ISED ISED BY LOGGED 1 of 6 1. PURPOSE To provide quality assurance during the manufacturing processes of the AuraSound NS3-194-8E full range speaker and to define the standard
DATE PREPARED CREATED BY DATE ISED ISED BY LOGGED 1 of 6 1. PURPOSE To provide quality assurance during the manufacturing processes of the AuraSound NS3-194-8E full range speaker and to define the standard
AmpFlex Flexible Current Probes
 AmpFlex Flexible Current Probes SAFETY R A T I N G The AmpFlex is a flexible AC current probe composed of a flexible sensor and an electronic module. The flexible sensor permits measurements on conductors
AmpFlex Flexible Current Probes SAFETY R A T I N G The AmpFlex is a flexible AC current probe composed of a flexible sensor and an electronic module. The flexible sensor permits measurements on conductors
Simrad ITI Trawl monitoring system
 Simrad ITI Trawl monitoring system Measures position of signel and twin trawls Full range of sensors Split beam transducer technology Nine display modes of efficient use Well proven technology Locate lost
Simrad ITI Trawl monitoring system Measures position of signel and twin trawls Full range of sensors Split beam transducer technology Nine display modes of efficient use Well proven technology Locate lost
Pet Selective Automated Food Dispenser
 Pet Selective Automated Food Dispenser By Advika Battini Ali Yaqoob Vibhu Vanjari TA: Yuchen He Team Number: 46 Proposal for ECE 445, Senior Design, Spring 2018, University of Illinois Urbana Champaign
Pet Selective Automated Food Dispenser By Advika Battini Ali Yaqoob Vibhu Vanjari TA: Yuchen He Team Number: 46 Proposal for ECE 445, Senior Design, Spring 2018, University of Illinois Urbana Champaign
AGILITY OBSTACLE GUIDELINES
 FEDERATION CYNOLOGIQUE INTERNATIONALE (AISBL) Place Albert 1 er, 13 B 6530 Thuin, tel : +32.71.59.12.38, fax : +32.71.59.22.29, internet : http://www.fci.be AGILITY OBSTACLE GUIDELINES January 1 2018 TABLE
FEDERATION CYNOLOGIQUE INTERNATIONALE (AISBL) Place Albert 1 er, 13 B 6530 Thuin, tel : +32.71.59.12.38, fax : +32.71.59.22.29, internet : http://www.fci.be AGILITY OBSTACLE GUIDELINES January 1 2018 TABLE
It Is Raining Cats. Margaret Kwok St #: Biology 438
 It Is Raining Cats Margaret Kwok St #: 80445992 Biology 438 Abstract Cats are known to right themselves by rotating their bodies while falling through the air and despite being released from almost any
It Is Raining Cats Margaret Kwok St #: 80445992 Biology 438 Abstract Cats are known to right themselves by rotating their bodies while falling through the air and despite being released from almost any
Nathan A. Thompson, Ph.D. Adjunct Faculty, University of Cincinnati Vice President, Assessment Systems Corporation
 An Introduction to Computerized Adaptive Testing Nathan A. Thompson, Ph.D. Adjunct Faculty, University of Cincinnati Vice President, Assessment Systems Corporation Welcome! CAT: tests that adapt to each
An Introduction to Computerized Adaptive Testing Nathan A. Thompson, Ph.D. Adjunct Faculty, University of Cincinnati Vice President, Assessment Systems Corporation Welcome! CAT: tests that adapt to each
Lecture 1: Turtle Graphics. the turtle and the crane and the swallow observe the time of their coming; Jeremiah 8:7
 Lecture 1: Turtle Graphics the turtle and the crane and the sallo observe the time of their coming; Jeremiah 8:7 1. Turtle Graphics The turtle is a handy paradigm for the study of geometry. Imagine a turtle
Lecture 1: Turtle Graphics the turtle and the crane and the sallo observe the time of their coming; Jeremiah 8:7 1. Turtle Graphics The turtle is a handy paradigm for the study of geometry. Imagine a turtle
Prosthetic Feet. Geriatric-Foot, light, 10 mm heel
 In the course of human evolution from quadruped to biped, the healthy foot has decisively changed in its function and complexity. It is the load-bearing element of the body. A high number of receptors
In the course of human evolution from quadruped to biped, the healthy foot has decisively changed in its function and complexity. It is the load-bearing element of the body. A high number of receptors
Population Dynamics: Predator/Prey Teacher Version
 Population Dynamics: Predator/Prey Teacher Version In this lab students will simulate the population dynamics in the lives of bunnies and wolves. They will discover how both predator and prey interact
Population Dynamics: Predator/Prey Teacher Version In this lab students will simulate the population dynamics in the lives of bunnies and wolves. They will discover how both predator and prey interact
2. Stress analysis in the pair sled - flat insert for bi-condylar endoprosthesis by W.LINK
 Journal of Applied Mathematics and Computational Mechanics 2015, 14(2), 41-48 www.amcm.pcz.pl p-issn 2299-9965 DOI: 10.17512/jamcm.2015.2.05 e-issn 2353-0588 STRESS OCCURRING IN THE FRICTION NODE OF ELEMENTS
Journal of Applied Mathematics and Computational Mechanics 2015, 14(2), 41-48 www.amcm.pcz.pl p-issn 2299-9965 DOI: 10.17512/jamcm.2015.2.05 e-issn 2353-0588 STRESS OCCURRING IN THE FRICTION NODE OF ELEMENTS
MARINE CRANES LIFETIME EXCELLENCE PALFINGER MARINE YOUR WORLDWIDE SPECIALIST FOR RELIABLE AND INNOVATIVE MARINE AND OFFSHORE CRANES
 MARINE CRANES LIFETIME EXCELLENCE PALFINGER MARINE YOUR WORLDWIDE SPECIALIST FOR RELIABLE AND INNOVATIVE MARINE AND OFFSHORE CRANES 1 LIFETIME EXCELLENCE OUR PRODUCTS ARE DESIGNED TO SATISFY THE SPECIFIC
MARINE CRANES LIFETIME EXCELLENCE PALFINGER MARINE YOUR WORLDWIDE SPECIALIST FOR RELIABLE AND INNOVATIVE MARINE AND OFFSHORE CRANES 1 LIFETIME EXCELLENCE OUR PRODUCTS ARE DESIGNED TO SATISFY THE SPECIFIC
Effects of Cage Stocking Density on Feeding Behaviors of Group-Housed Laying Hens
 AS 651 ASL R2018 2005 Effects of Cage Stocking Density on Feeding Behaviors of Group-Housed Laying Hens R. N. Cook Iowa State University Hongwei Xin Iowa State University, hxin@iastate.edu Recommended
AS 651 ASL R2018 2005 Effects of Cage Stocking Density on Feeding Behaviors of Group-Housed Laying Hens R. N. Cook Iowa State University Hongwei Xin Iowa State University, hxin@iastate.edu Recommended
Turtle Ballet: Simulating Parallel Turtles in a Nonparallel LOGO Version. Erich Neuwirth
 Turtle Ballet: Simulating Parallel Turtles in a Nonparallel LOGO Version Erich Neuwirth University of Vienna, Dept. of Statistics and Decision Support Systems Computer Supported Didactics Working Group
Turtle Ballet: Simulating Parallel Turtles in a Nonparallel LOGO Version Erich Neuwirth University of Vienna, Dept. of Statistics and Decision Support Systems Computer Supported Didactics Working Group
Mathematical models for dog rabies that include the curtailing effect of human intervention
 Mathematical models for dog rabies that include the curtailing effect of human intervention Tiffany Ngo Leung Supervised by Dr Stephen A Davis RMIT University Abstract Rabies is a zoonotic viral disease
Mathematical models for dog rabies that include the curtailing effect of human intervention Tiffany Ngo Leung Supervised by Dr Stephen A Davis RMIT University Abstract Rabies is a zoonotic viral disease
Dynamic Programming for Linear Time Incremental Parsing
 Dynamic Programming for Linear Time ncremental Parsing Liang Huang nformation Sciences nstitute University of Southern California Kenji Sagae nstitute for Creative Technologies University of Southern California
Dynamic Programming for Linear Time ncremental Parsing Liang Huang nformation Sciences nstitute University of Southern California Kenji Sagae nstitute for Creative Technologies University of Southern California
A Column Generation Algorithm to Solve a Synchronized Log-Truck Scheduling Problem
 A Column Generation Algorithm to Solve a Synchronized Log-Truck Scheduling Problem Odysseus 2012 Greg Rix 12 Louis-Martin Rousseau 12 Gilles Pesant 13 1 Interuniversity Research Centre on Enterprise Networks,
A Column Generation Algorithm to Solve a Synchronized Log-Truck Scheduling Problem Odysseus 2012 Greg Rix 12 Louis-Martin Rousseau 12 Gilles Pesant 13 1 Interuniversity Research Centre on Enterprise Networks,
King Fahd University of Petroleum & Minerals College of Industrial Management
 King Fahd University of Petroleum & Minerals College of Industrial Management CIM COOP PROGRAM POLICIES AND DELIVERABLES The CIM Cooperative Program (COOP) period is an essential and critical part of your
King Fahd University of Petroleum & Minerals College of Industrial Management CIM COOP PROGRAM POLICIES AND DELIVERABLES The CIM Cooperative Program (COOP) period is an essential and critical part of your
TECHNICAL BULLETIN Claude Toudic Broiler Specialist June 2006
 Evaluating uniformity in broilers factors affecting variation During a technical visit to a broiler farm the topic of uniformity is generally assessed visually and subjectively, as to do the job properly
Evaluating uniformity in broilers factors affecting variation During a technical visit to a broiler farm the topic of uniformity is generally assessed visually and subjectively, as to do the job properly
Answers to Questions about Smarter Balanced 2017 Test Results. March 27, 2018
 Answers to Questions about Smarter Balanced Test Results March 27, 2018 Smarter Balanced Assessment Consortium, 2018 Table of Contents Table of Contents...1 Background...2 Jurisdictions included in Studies...2
Answers to Questions about Smarter Balanced Test Results March 27, 2018 Smarter Balanced Assessment Consortium, 2018 Table of Contents Table of Contents...1 Background...2 Jurisdictions included in Studies...2
We recommend you cite the published version. The publisher s URL is
 Prescott, T., Pearson, M., Mitchinson, B., Sullivan, J. and Pipe, A. (29) Whisking with robots: From rat vibrissae to biomimetic technology for active touch. IEEE Robotics and Automation Magazine, 16 (3).
Prescott, T., Pearson, M., Mitchinson, B., Sullivan, J. and Pipe, A. (29) Whisking with robots: From rat vibrissae to biomimetic technology for active touch. IEEE Robotics and Automation Magazine, 16 (3).
FPGA-based Emotional Behavior Design for Pet Robot
 FPGA-based Emotional Behavior Design for Pet Robot Chi-Tai Cheng, Shih-An Li, Yu-Ting Yang, and Ching-Chang Wong Department of Electrical Engineering, Tamkang University 151, Ying-Chuan Road, Tamsui, Taipei
FPGA-based Emotional Behavior Design for Pet Robot Chi-Tai Cheng, Shih-An Li, Yu-Ting Yang, and Ching-Chang Wong Department of Electrical Engineering, Tamkang University 151, Ying-Chuan Road, Tamsui, Taipei
Population Dynamics: Predator/Prey Teacher Version
 Population Dynamics: Predator/Prey Teacher Version In this lab students will simulate the population dynamics in the lives of bunnies and wolves. They will discover how both predator and prey interact
Population Dynamics: Predator/Prey Teacher Version In this lab students will simulate the population dynamics in the lives of bunnies and wolves. They will discover how both predator and prey interact
MGL Avionics EFIS G2 and iefis. Guide to using the MGL RDAC CAN interface with the UL Power engines
 MGL Avionics EFIS G2 and iefis Guide to using the MGL RDAC CAN interface with the UL Power engines General The RDAC CAN interface forms the bridge between the UL Power ECU and an MGL Avionics G2 EFIS system
MGL Avionics EFIS G2 and iefis Guide to using the MGL RDAC CAN interface with the UL Power engines General The RDAC CAN interface forms the bridge between the UL Power ECU and an MGL Avionics G2 EFIS system
Photographic & Measurement Comparison
 Photographic & Measurement Comparison CAT (GEN III) vs. F-CAT Introduction: 1. The Element Cat (E-CAT) is a very carefully made counterfeit CAT tourniquet. 2. It is manufactured in Hong Kong for $8.50
Photographic & Measurement Comparison CAT (GEN III) vs. F-CAT Introduction: 1. The Element Cat (E-CAT) is a very carefully made counterfeit CAT tourniquet. 2. It is manufactured in Hong Kong for $8.50
Complete Solutions for BROILER BREEDERS
 Complete Solutions for BROILER BREEDERS Global Presence Local Commitment Feeding Drinking Climate Housing Complete Broiler Breeder Packages Broiler-Breeders We at Plasson are aware that the main goal in
Complete Solutions for BROILER BREEDERS Global Presence Local Commitment Feeding Drinking Climate Housing Complete Broiler Breeder Packages Broiler-Breeders We at Plasson are aware that the main goal in
Biomechanics of the Vibrissa Motor Plant in Rat: Rhythmic Whisking Consists of Triphasic Neuromuscular Activity
 3438 The Journal of Neuroscience, March 26, 2008 28(13):3438 3455 Behavioral/Systems/Cognitive Biomechanics of the Vibrissa Motor Plant in Rat: Rhythmic Whisking Consists of Triphasic Neuromuscular Activity
3438 The Journal of Neuroscience, March 26, 2008 28(13):3438 3455 Behavioral/Systems/Cognitive Biomechanics of the Vibrissa Motor Plant in Rat: Rhythmic Whisking Consists of Triphasic Neuromuscular Activity
ANIMAL BEHAVIOR. Laboratory: a Manual to Accompany Biology. Saunders College Publishing: Philadelphia.
 PRESENTED BY KEN Yasukawa at the 2007 ABS Annual Meeting Education Workshop Burlington VT ANIMAL BEHAVIOR Humans have always been interested in animals and how they behave because animals are a source
PRESENTED BY KEN Yasukawa at the 2007 ABS Annual Meeting Education Workshop Burlington VT ANIMAL BEHAVIOR Humans have always been interested in animals and how they behave because animals are a source
5 State of the Turtles
 CHALLENGE 5 State of the Turtles In the previous Challenges, you altered several turtle properties (e.g., heading, color, etc.). These properties, called turtle variables or states, allow the turtles to
CHALLENGE 5 State of the Turtles In the previous Challenges, you altered several turtle properties (e.g., heading, color, etc.). These properties, called turtle variables or states, allow the turtles to
Simulation of the ASFA system in an ERTMS simulator
 Computers in Railways XI 853 Simulation of the ASFA system in an ERTMS simulator I. Gómez-Rey, J. M. Mera & A. Lorenzo CITEF, Universidad Politécnica de Madrid, Spain Abstract Due to the economic, technical
Computers in Railways XI 853 Simulation of the ASFA system in an ERTMS simulator I. Gómez-Rey, J. M. Mera & A. Lorenzo CITEF, Universidad Politécnica de Madrid, Spain Abstract Due to the economic, technical
Lecture 4: Controllability and observability
 Lecture 4: Controllability and observability Lecture 4: Controllability and observability p.1/9 Part 1: Controllability Lecture 4: Controllability and observability p.2/9 Example Two inverted pendula mounted
Lecture 4: Controllability and observability Lecture 4: Controllability and observability p.1/9 Part 1: Controllability Lecture 4: Controllability and observability p.2/9 Example Two inverted pendula mounted
AGILITY REGULATIONS OF THE. Open Junior Agility Championships
 AGILITY REGULATIONS OF THE Open Junior Agility Championships 2016-2017 Content Our Aim 3 Introduction 3 Handler Age Categories 3 Jump Height Categories 3 Courses 3 - General - Course Design - Competition
AGILITY REGULATIONS OF THE Open Junior Agility Championships 2016-2017 Content Our Aim 3 Introduction 3 Handler Age Categories 3 Jump Height Categories 3 Courses 3 - General - Course Design - Competition
SIZING THE DAM BUSTER RAINHEAD
 1 P a g e SIZING THE DAM BUSTER RAINHEAD 1 Size the catchment area by referring to the Dam Buster Design Guide. Follow Step 1, Step 2 and Step 3 to determine the roof catchment area design flow rate in
1 P a g e SIZING THE DAM BUSTER RAINHEAD 1 Size the catchment area by referring to the Dam Buster Design Guide. Follow Step 1, Step 2 and Step 3 to determine the roof catchment area design flow rate in
Teaching Assessment Lessons
 DOG TRAINER PROFESSIONAL Lesson 19 Teaching Assessment Lessons The lessons presented here reflect the skills and concepts that are included in the KPA beginner class curriculum (which is provided to all
DOG TRAINER PROFESSIONAL Lesson 19 Teaching Assessment Lessons The lessons presented here reflect the skills and concepts that are included in the KPA beginner class curriculum (which is provided to all
Dr Nick Hill. Contents. Our mission is to develop products which educate and empower owners to provide a higher level of care for their pets.
 Contents Sure Petcare: The Story So Far... 4-7 Connected Product Ecosystem... 8 The Sure Petcare App... 10 App-controlled Pet Doors... 12 App-controlled Feeding and Monitoring... 14 Activity and Behaviour
Contents Sure Petcare: The Story So Far... 4-7 Connected Product Ecosystem... 8 The Sure Petcare App... 10 App-controlled Pet Doors... 12 App-controlled Feeding and Monitoring... 14 Activity and Behaviour
Conflict-Related Aggression
 Conflict-Related Aggression and other problems In the past many cases of aggression towards owners and also a variety of other problem behaviours, such as lack of responsiveness to commands, excessive
Conflict-Related Aggression and other problems In the past many cases of aggression towards owners and also a variety of other problem behaviours, such as lack of responsiveness to commands, excessive
Guided Study Program in System Dynamics System Dynamics in Education Project System Dynamics Group MIT Sloan School of Management 1
 Guided Study Program in System Dynamics System Dynamics in Education Project System Dynamics Group MIT Sloan School of Management 1 Solutions to Assignment #26 Tuesday, June 8, 1999 Reading Assignment:
Guided Study Program in System Dynamics System Dynamics in Education Project System Dynamics Group MIT Sloan School of Management 1 Solutions to Assignment #26 Tuesday, June 8, 1999 Reading Assignment:
Mammalogy Lecture 8 - Evolution of Ear Ossicles
 Mammalogy Lecture 8 - Evolution of Ear Ossicles I. To begin, let s examine briefly the end point, that is, modern mammalian ears. Inner Ear The cochlea contains sensory cells for hearing and balance. -
Mammalogy Lecture 8 - Evolution of Ear Ossicles I. To begin, let s examine briefly the end point, that is, modern mammalian ears. Inner Ear The cochlea contains sensory cells for hearing and balance. -
VNA Level III Module 1: Business Realities
 VNA Level III Module 1: Business Realities Learning Objectives After completing this module, the benefits you realize should include: Understanding some of the costs of operating a successful veterinary
VNA Level III Module 1: Business Realities Learning Objectives After completing this module, the benefits you realize should include: Understanding some of the costs of operating a successful veterinary
Product Info Applications System Mgt References Competition
 Product Presentation 1 Major aim during the laying period 2 More chicks per hen housed Higher hatchability Higher production More chickens per hen housed Greater profit per flock 3 1 Optimal use of your
Product Presentation 1 Major aim during the laying period 2 More chicks per hen housed Higher hatchability Higher production More chickens per hen housed Greater profit per flock 3 1 Optimal use of your
POLICE K9 UNIVERSITY 2016 NINO DROWAERT ALL RIGHTS RESERVED
 POLICE K9 UNIVERSITY Police K9 University is an exclusive training program for law enforcement, military and security agencies. Nino s unique crossover from a high level dog sports background transcending
POLICE K9 UNIVERSITY Police K9 University is an exclusive training program for law enforcement, military and security agencies. Nino s unique crossover from a high level dog sports background transcending
Introduction to phylogenetic trees and tree-thinking Copyright 2005, D. A. Baum (Free use for non-commercial educational pruposes)
") Introduction to phylogenetic trees and tree-thinking Copyright 2005, D. A. Baum (Free use for non-commercial educational pruposes) Phylogenetics is the study of the relationships of organisms to each other.
Introduction to phylogenetic trees and tree-thinking Copyright 2005, D. A. Baum (Free use for non-commercial educational pruposes) Phylogenetics is the study of the relationships of organisms to each other.
Performance Analysis of HOM in LTE Small Cell
 Sensors & Transducers, Vol. 170, Issue 5, May 014, pp. 160-164 Sensors & Transducers 014 by IFSA Publishing, S. L. http://www.sensorsportal.com Performance Analysis of HOM in LTE Small Cell Juan HANG Practice
Sensors & Transducers, Vol. 170, Issue 5, May 014, pp. 160-164 Sensors & Transducers 014 by IFSA Publishing, S. L. http://www.sensorsportal.com Performance Analysis of HOM in LTE Small Cell Juan HANG Practice
Creating Strategic Capital for EVM. EVA th June 2012 Andrew Hill PROJECT CONTROLS CONSULTING
 Creating Strategic Capital for EVM Responsible for the successful delivery of projects for our clients EVA 17 13 th June 2012 Andrew Hill Strategic Capital What is strategy? Analytical thinking & commitment
Creating Strategic Capital for EVM Responsible for the successful delivery of projects for our clients EVA 17 13 th June 2012 Andrew Hill Strategic Capital What is strategy? Analytical thinking & commitment
THE PECO BONING AID A TECHNOLOGICAL ENHANCEMENT OF BEEF QUARTER BONING PRODUCTIVITY
 THE PECO BONING AID THE PECO BONING AID A TECHNOLOGICAL ENHANCEMENT OF BEEF QUARTER BONING PRODUCTIVITY Traditional beef quarter boning techniques have largely remained unchanged for decades. Recent technological
THE PECO BONING AID THE PECO BONING AID A TECHNOLOGICAL ENHANCEMENT OF BEEF QUARTER BONING PRODUCTIVITY Traditional beef quarter boning techniques have largely remained unchanged for decades. Recent technological
A quantitative study of hair growth using mouse and rat vibrissal follicles
 /. Embryol. exp. Morph. Vol. 72, pp. 209-224, 1982 209 Printed in Great Britain Company of Biologists Limited 1982 A quantitative study of hair growth using mouse and rat vibrissal follicles I. Dermal
/. Embryol. exp. Morph. Vol. 72, pp. 209-224, 1982 209 Printed in Great Britain Company of Biologists Limited 1982 A quantitative study of hair growth using mouse and rat vibrissal follicles I. Dermal
Franck Berthe Head of Animal Health and Welfare Unit (AHAW)
") EFSA s information meeting: identification of welfare indicators for monitoring procedures at slaughterhouses Parma, 30/01/2013 The role of EFSA in Animal Welfare Activities of the AHAW Unit Franck Berthe
EFSA s information meeting: identification of welfare indicators for monitoring procedures at slaughterhouses Parma, 30/01/2013 The role of EFSA in Animal Welfare Activities of the AHAW Unit Franck Berthe
Trends and challenges in Engineering geodesy
 Trends and challenges in Engineering geodesy Rudolf STAIGER rudolf.staiger@hs-bochum.de International Federation of Surveyors Féderation Internationale des Géomètres Internationale Vereinigung der Vermessungsingenieure
Trends and challenges in Engineering geodesy Rudolf STAIGER rudolf.staiger@hs-bochum.de International Federation of Surveyors Féderation Internationale des Géomètres Internationale Vereinigung der Vermessungsingenieure
Proceedings of the ASME nd International Conference on Ocean, Offshore and Arctic Engineering OMAE2013 June 9-14, 2013, Nantes, France
 Proceedings of the ASME 213 32nd International Conference on Ocean, Offshore and Arctic Engineering OMAE213 June 9-14, 213, Nantes, France OMAE213-149 SIMULATION OF HOOKING EVENT IN FISH TRAWLING OPERATION
Proceedings of the ASME 213 32nd International Conference on Ocean, Offshore and Arctic Engineering OMAE213 June 9-14, 213, Nantes, France OMAE213-149 SIMULATION OF HOOKING EVENT IN FISH TRAWLING OPERATION
Point of Care Diagnostics: the Client vs. Veterinary Perspective Andrew J Rosenfeld, DVM ABVP
 GLOBAL DIAGNOSTICS Point of Care Diagnostics: the Client vs. Veterinary Perspective Andrew J Rosenfeld, DVM ABVP While many veterinary facilities perform a majority of their diagnostic and preventive care
GLOBAL DIAGNOSTICS Point of Care Diagnostics: the Client vs. Veterinary Perspective Andrew J Rosenfeld, DVM ABVP While many veterinary facilities perform a majority of their diagnostic and preventive care
Tool holders from Sandvik Coromant. Hydro-Grip. Assortment of high precision chucks
 Tool holders from Sandvik Coromant Hydro-Grip Assortment of high precision chucks * up to three times the force of conventional chucks Hydro-Grip high precision tool holders are your guarantee of secure
Tool holders from Sandvik Coromant Hydro-Grip Assortment of high precision chucks * up to three times the force of conventional chucks Hydro-Grip high precision tool holders are your guarantee of secure
How to Design Worlds
 How to Design Worlds CS 5010 Program Design Paradigms Bootcamp Lesson 3.2 Mitchell Wand, 2012-2014 This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License. 1
How to Design Worlds CS 5010 Program Design Paradigms Bootcamp Lesson 3.2 Mitchell Wand, 2012-2014 This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License. 1
AUGERMATIC. The feeding system for successful poultry growing
 AUGERMATIC The feeding system for successful poultry growing AUGERMATIC this unive A feeding system for poulty growing must meet very high standards depending on feed distribution (ad libitum or controlled
AUGERMATIC The feeding system for successful poultry growing AUGERMATIC this unive A feeding system for poulty growing must meet very high standards depending on feed distribution (ad libitum or controlled
Required and Recommended Supporting Information for IUCN Red List Assessments
 Required and Recommended Supporting Information for IUCN Red List Assessments This is Annex 1 of the Rules of Procedure for IUCN Red List Assessments 2017 2020 as approved by the IUCN SSC Steering Committee
Required and Recommended Supporting Information for IUCN Red List Assessments This is Annex 1 of the Rules of Procedure for IUCN Red List Assessments 2017 2020 as approved by the IUCN SSC Steering Committee
Big Box Retailer Offender, Shopper, Employee Feedback Study
 Big Box Retailer Offender, Shopper, Employee Feedback Study Turtle Device Dr. Uma Sarmistha, Kyle Grottini, Corrie Tallman Executive Summary Introduction The Loss Prevention Research Council (LPRC) conducted
Big Box Retailer Offender, Shopper, Employee Feedback Study Turtle Device Dr. Uma Sarmistha, Kyle Grottini, Corrie Tallman Executive Summary Introduction The Loss Prevention Research Council (LPRC) conducted
Reptilepro. Code No. Description Specification Packing
 TURTLE ISLAND Magnetic Floating Platform Natural looking basking area for aquatic turtles. Stable mounting allows aquatic turtles to climb easily. Magnetic mount that s easy to install, adjust and move!
TURTLE ISLAND Magnetic Floating Platform Natural looking basking area for aquatic turtles. Stable mounting allows aquatic turtles to climb easily. Magnetic mount that s easy to install, adjust and move!
Shepherding Behaviors with Multiple Shepherds
 Shepherding Behaviors with Multiple Shepherds Jyh-Ming Lien Parasol Lab, Texas A&M neilien@cs.tamu.edu Samuel Rodríguez Parasol Lab, Texas A&M sor8786@cs.tamu.edu Jean-Phillipe Malric IMERIR, Univ. Perpignan,
Shepherding Behaviors with Multiple Shepherds Jyh-Ming Lien Parasol Lab, Texas A&M neilien@cs.tamu.edu Samuel Rodríguez Parasol Lab, Texas A&M sor8786@cs.tamu.edu Jean-Phillipe Malric IMERIR, Univ. Perpignan,
Multi-Frequency Study of the B3 VLA Sample. I GHz Data
 A&A manuscript no. (will be inserted by hand later) Your thesaurus codes are: 13.18.2-11.07.1-11.17.3 ASTRONOMY AND ASTROPHYSICS 3.9.1998 Multi-Frequency Study of the B3 VLA Sample. I. 10.6-GHz Data L.
A&A manuscript no. (will be inserted by hand later) Your thesaurus codes are: 13.18.2-11.07.1-11.17.3 ASTRONOMY AND ASTROPHYSICS 3.9.1998 Multi-Frequency Study of the B3 VLA Sample. I. 10.6-GHz Data L.
Behavior Modification Reinforcement and Rewards
 21 Behavior Modification Reinforcement and Rewards The best way to train your pet is through the proper use of positive reinforcement and rewards while simultaneously avoiding punishment. The goal of training
21 Behavior Modification Reinforcement and Rewards The best way to train your pet is through the proper use of positive reinforcement and rewards while simultaneously avoiding punishment. The goal of training
STUDENT MANUAL CANINE SEARCH SPECIALIST TRAINING UNIT 3: ROLE OF THE HELPER
 STUDENT MANUAL CANINE SEARCH SPECIALIST TRAINING UNIT 3: ROLE OF THE HELPER Unit Objective Enabling Objectives Upon completion of this unit, you will be able to describe the function of the helper. You
STUDENT MANUAL CANINE SEARCH SPECIALIST TRAINING UNIT 3: ROLE OF THE HELPER Unit Objective Enabling Objectives Upon completion of this unit, you will be able to describe the function of the helper. You
SMD Power Inductor 4R7. Dimensions. A max. B max. Inductance and rated current ranges
 CD Series SMD Power Inductor 4R7 EPOXY D E J F I H Features -High power, High saturation inductors -Ideal inductors for DC-DC converters in notebook computer, PDAs, Step-up or step-down converters, flash
CD Series SMD Power Inductor 4R7 EPOXY D E J F I H Features -High power, High saturation inductors -Ideal inductors for DC-DC converters in notebook computer, PDAs, Step-up or step-down converters, flash
Welcome to the case study for how I cured my dog s doorbell barking in just 21 days.
 Welcome to the case study for how I cured my dog s doorbell barking in just 21 days. My name is Chet Womach, and I am the founder of TheDogTrainingSecret.com, a website dedicated to giving people simple
Welcome to the case study for how I cured my dog s doorbell barking in just 21 days. My name is Chet Womach, and I am the founder of TheDogTrainingSecret.com, a website dedicated to giving people simple
Define evidence based practices for selection and duration of antibiotics to treat suspected or confirmed neonatal sepsis
 GLOBAL AIM: Antibiotic Stewardship Perinatal Quality Improvement Teams (PQITs) will share strategies and lessons learned to develop potentially better practices and employ QI methodologies to establish
GLOBAL AIM: Antibiotic Stewardship Perinatal Quality Improvement Teams (PQITs) will share strategies and lessons learned to develop potentially better practices and employ QI methodologies to establish
Pixie-7P. Battery Connector Pixie-7P Fuse* Motor. 2.2 Attaching the Motor Leads. 1.0 Features of the Pixie-7P: Pixie-7P Batt Motor
 1.0 Features of the Pixie-7P: Microprocessor controlled Low Resistance (.007 ohms) High rate (2800 Hz) switching (PWM) Up to 7 Amps continuous current (with proper air flow) High Output (1.2amp) Battery
1.0 Features of the Pixie-7P: Microprocessor controlled Low Resistance (.007 ohms) High rate (2800 Hz) switching (PWM) Up to 7 Amps continuous current (with proper air flow) High Output (1.2amp) Battery
AGILITY REGULATIONS OF THE. Open Junior Agility Championships
 AGILITY REGULATIONS OF THE Open Junior Agility Championships 2013 Content Our Aim 3 Introduction 3 Handler Age Categories 3 Jump Height Categories 3 Courses 3 - General - Course Design - Competition Process
AGILITY REGULATIONS OF THE Open Junior Agility Championships 2013 Content Our Aim 3 Introduction 3 Handler Age Categories 3 Jump Height Categories 3 Courses 3 - General - Course Design - Competition Process
Controllability of Complex Networks. Yang-Yu Liu, Jean-Jacques Slotine, Albert-Laszlo Barbasi Presented By Arindam Bhattacharya
 Controllability of Complex Networks Yang-Yu Liu, Jean-Jacques Slotine, Albert-Laszlo Barbasi Presented By Arindam Bhattacharya Index Overview Network Controllability Controllability of real networks An
Controllability of Complex Networks Yang-Yu Liu, Jean-Jacques Slotine, Albert-Laszlo Barbasi Presented By Arindam Bhattacharya Index Overview Network Controllability Controllability of real networks An
A-FAVP.1 Foundations of Advanced Veterinary Practice
 A-FAVP.1 Foundations of Advanced Veterinary Practice Credits: Provider: 10 (100 hours) Veterinary Postgraduate Unit School of Veterinary Science RCVS Content Covered Conceptual Outline The scope of the
A-FAVP.1 Foundations of Advanced Veterinary Practice Credits: Provider: 10 (100 hours) Veterinary Postgraduate Unit School of Veterinary Science RCVS Content Covered Conceptual Outline The scope of the
ICAO WCO Joint Conference on Enhancing Air Cargo Security and Facilitation
 ICAO WCO Joint Conference on Enhancing Air Cargo Security and Facilitation IMPLEMENTATION OF MOST PROGRESSIVE METHODS OF USING DOGS FOR CARGO SCREENING Azat G. Zaripov, Deputy Head of Aviation Security
ICAO WCO Joint Conference on Enhancing Air Cargo Security and Facilitation IMPLEMENTATION OF MOST PROGRESSIVE METHODS OF USING DOGS FOR CARGO SCREENING Azat G. Zaripov, Deputy Head of Aviation Security
Recurrent neural network grammars. Slide credits: Chris Dyer, Adhiguna Kuncoro
 Recurrent neural network grammars Slide credits: Chris Dyer, Adhiguna Kuncoro Widespread phenomenon: Polarity items can only appear in certain contexts Example: anybody is a polarity item that tends to
Recurrent neural network grammars Slide credits: Chris Dyer, Adhiguna Kuncoro Widespread phenomenon: Polarity items can only appear in certain contexts Example: anybody is a polarity item that tends to
Grade: 8. Author: Hope Phillips
 Title: Fish Aquariums Real-World Connection: Grade: 8 Author: Hope Phillips BIG Idea: Linear Functions Fish aquariums can be found in homes, restaurants, and businesses. From simple goldfish to exotic
Title: Fish Aquariums Real-World Connection: Grade: 8 Author: Hope Phillips BIG Idea: Linear Functions Fish aquariums can be found in homes, restaurants, and businesses. From simple goldfish to exotic
Development of the New Zealand strategy for local eradication of tuberculosis from wildlife and livestock
 Livingstone et al. New Zealand Veterinary Journal http://dx.doi.org/*** S1 Development of the New Zealand strategy for local eradication of tuberculosis from wildlife and livestock PG Livingstone* 1, N
Livingstone et al. New Zealand Veterinary Journal http://dx.doi.org/*** S1 Development of the New Zealand strategy for local eradication of tuberculosis from wildlife and livestock PG Livingstone* 1, N
TECHNICAL, NON-VISUAL CHARACTERIZATION OF SUBSTRATE CONTACT USING CARPAL VIBRISSAE AS A BIOLOGICAL MODEL: AN OVERVIEW
 URN (Paper): urn:nbn:de:gbv:ilm1-2014iwk-175:8 58 th ILMENAU SCIENTIFIC COLLOQUIUM Technische Universität Ilmenau, 08 12 September 2014 URN: urn:nbn:de:gbv:ilm1-2014iwk:3 TECHNICAL, NON-VISUAL CHARACTERIZATION
URN (Paper): urn:nbn:de:gbv:ilm1-2014iwk-175:8 58 th ILMENAU SCIENTIFIC COLLOQUIUM Technische Universität Ilmenau, 08 12 September 2014 URN: urn:nbn:de:gbv:ilm1-2014iwk:3 TECHNICAL, NON-VISUAL CHARACTERIZATION
WHO (HQ/MZCP) Intercountry EXPERT WORKSHOP ON DOG AND WILDLIFE RABIES CONTROL IN JORDAN AND THE MIDDLE EAST. 23/25 June, 2008, Amman, Jordan
 Intercountry EXPERT WORKSHOP ON DOG AND WILDLIFE RABIES CONTROL IN JORDAN AND THE MIDDLE EAST. 23/25 June, 2008, Amman, Jordan") WHO (HQ/MZCP) Intercountry EXPERT WORKSHOP ON DOG AND WILDLIFE RABIES CONTROL IN JORDAN AND THE MIDDLE EAST 23/25 June, 2008, Amman, Jordan Good practices in intersectoral rabies prevention and control
WHO (HQ/MZCP) Intercountry EXPERT WORKSHOP ON DOG AND WILDLIFE RABIES CONTROL IN JORDAN AND THE MIDDLE EAST 23/25 June, 2008, Amman, Jordan Good practices in intersectoral rabies prevention and control
Applicability of Earn Value Management in Sri Lankan Construction Projects
 Applicability of Earn Value Management in Sri Lankan Construction Projects W.M.T Nimashanie 1 and A.A.D.A.J Perera 2 1 National Water Supply and Drainage Board Regional Support Centre (W-S) Mount Lavinia
Applicability of Earn Value Management in Sri Lankan Construction Projects W.M.T Nimashanie 1 and A.A.D.A.J Perera 2 1 National Water Supply and Drainage Board Regional Support Centre (W-S) Mount Lavinia
SWGDOG SC 9 - HUMAN SCENT DOGS Avalanche Search
 SWGDOG SC 9 - HUMAN SCENT DOGS Avalanche Search Posted for Public Comment 1/7/11 3/9/11. Approved by the membership 3/22/11. AVALANCHE SEARCHES Avalanche canines are typically used in areas such as ski
SWGDOG SC 9 - HUMAN SCENT DOGS Avalanche Search Posted for Public Comment 1/7/11 3/9/11. Approved by the membership 3/22/11. AVALANCHE SEARCHES Avalanche canines are typically used in areas such as ski
Pet Selective Automated Food Dispenser
 Pet Selective Automated Food Dispenser By Advika Battini Ali Yaqoob Vibhu Vanjari TA: Yuchen He Team Number: 46 Proposal for ECE 44, Senior Design, Spring 2018, University of Illinois Urbana Champaign
Pet Selective Automated Food Dispenser By Advika Battini Ali Yaqoob Vibhu Vanjari TA: Yuchen He Team Number: 46 Proposal for ECE 44, Senior Design, Spring 2018, University of Illinois Urbana Champaign
288 Seymour River Place North Vancouver, BC V7H 1W6
 288 Seymour River Place North Vancouver, BC V7H 1W6 animationtoys@gmail.com February 20 th, 2005 Mr. Lucky One School of Engineering Science Simon Fraser University 8888 University Dr. Burnaby, BC V5A
288 Seymour River Place North Vancouver, BC V7H 1W6 animationtoys@gmail.com February 20 th, 2005 Mr. Lucky One School of Engineering Science Simon Fraser University 8888 University Dr. Burnaby, BC V5A
Catapult Activity. Catapult Buy From Art.com
 Catapult Buy From Art.com Catapult Activity We typically think of a catapult as something that was used in the Middle Ages to destroy the walls of a castle as in the poster shown here. But Catapults have
Catapult Buy From Art.com Catapult Activity We typically think of a catapult as something that was used in the Middle Ages to destroy the walls of a castle as in the poster shown here. But Catapults have
Visual and Instrumental Evaluation of Mottling and Striping
 Visual and Instrumental Evaluation of Mottling and Striping Friedhelm Fensterseifer and Severin Wimmer BYK-Gardner User Meeting 2013 - Innsbruck, Austria Mottling / cloudiness of metallic coatings Irregular
Visual and Instrumental Evaluation of Mottling and Striping Friedhelm Fensterseifer and Severin Wimmer BYK-Gardner User Meeting 2013 - Innsbruck, Austria Mottling / cloudiness of metallic coatings Irregular
[Boston March for Science 2017 photo Hendrik Strobelt]
![[Boston March for Science 2017 photo Hendrik Strobelt]](/thumbs/83/87139673.jpg "[Boston March for Science 2017 photo Hendrik Strobelt]") [Boston March for Science 2017 photo Hendrik Strobelt] [Boston March for Science 2017] [Boston March for Science 2017] [Boston March for Science 2017] Object Detectors Emerge in Deep Scene CNNs Bolei
[Boston March for Science 2017 photo Hendrik Strobelt] [Boston March for Science 2017] [Boston March for Science 2017] [Boston March for Science 2017] Object Detectors Emerge in Deep Scene CNNs Bolei
List of the Major Changes to CKC Agility for 2014
 List of the Major Changes to CKC Agility for 2014 New Games: 1. Points and Distance - PAD This strategic titling game involves the accumulation of points within a specified time, and incorporates a distance
List of the Major Changes to CKC Agility for 2014 New Games: 1. Points and Distance - PAD This strategic titling game involves the accumulation of points within a specified time, and incorporates a distance
Using Earned Value in Scientific Research. David Roberts & Sheila Roberts CUPE International.
 Using Earned Value in Scientific Research David Roberts & Sheila Roberts CUPE International. Discussion of EVM in Scientific Research Exploring a behavioural approach to adopting EVM. Challenges Mindset
Using Earned Value in Scientific Research David Roberts & Sheila Roberts CUPE International. Discussion of EVM in Scientific Research Exploring a behavioural approach to adopting EVM. Challenges Mindset
The Devon Rex. CFA Judges Workshop
 The Devon Rex CFA Judges Workshop The Devon Rex a breed of unique appearance a characteristic elfin look One should be able to immediately recognize a Devon Rex from a distance by its distinctive head
The Devon Rex CFA Judges Workshop The Devon Rex a breed of unique appearance a characteristic elfin look One should be able to immediately recognize a Devon Rex from a distance by its distinctive head
Machine Learning.! A completely different way to have an. agent acquire the appropriate abilities to solve a particular goal is via machine learning.
 Machine Learning! A completely different way to have an agent acquire the appropriate abilities to solve a particular goal is via machine learning. Machine Learning! What is Machine Learning? " Programs
Machine Learning! A completely different way to have an agent acquire the appropriate abilities to solve a particular goal is via machine learning. Machine Learning! What is Machine Learning? " Programs