University of Pennsylvania. From Perception and Reasoning to Grasping
|
|
|
- Elinor Cummings
- 5 years ago
- Views:
Transcription
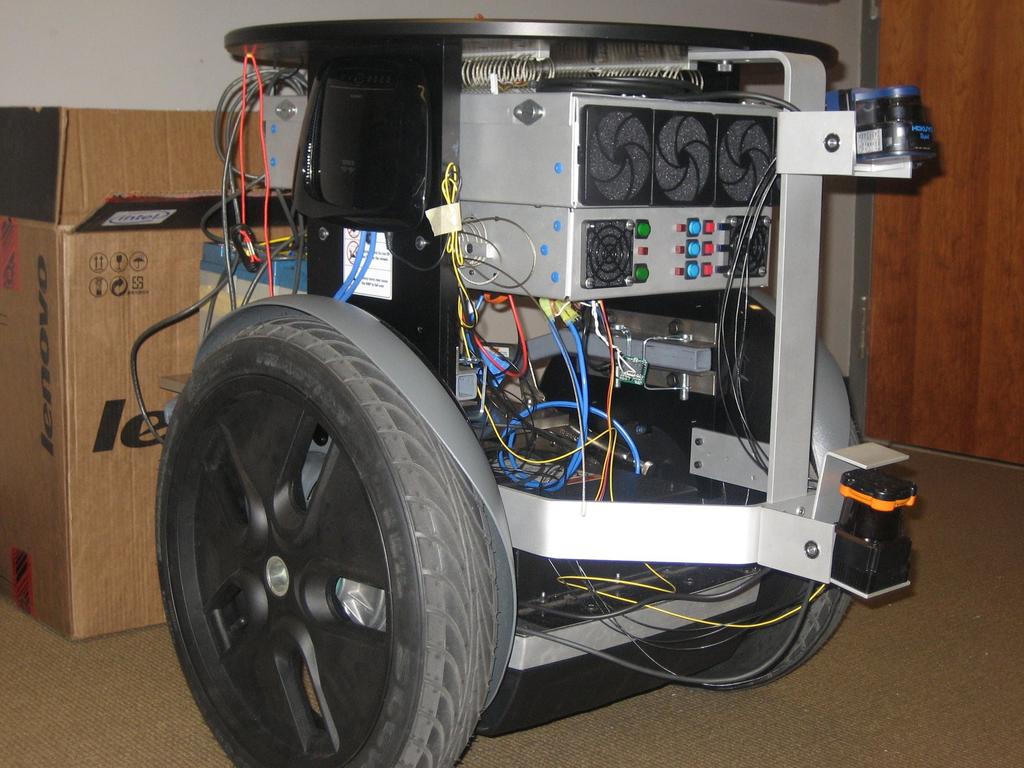
1 University of Pennsylvania GRASP LAB PR2GRASP: From Perception and Reasoning to Grasping Led by Maxim Likhachev Kostas Daniilides Vijay Kumar Katherine J. Kuchenbecker Jianbo Shi Daniel D. Lee Mark Yim Camillo Jose Taylor Student Representatives: Mike Phillips Benjamin Cohen Cody Phillips Soonkyum Kim





2 @ GRASP Lab
3 Research Proposal Planning for Navigation in Dynamic Environments Pennochio Project to Establish Telepresence through PR2 Kostas Daniilides Planning and Controls for two-arm Manipulation Jianbo Shi & Maxim Likhachev Visual Localization and Pose Estimation of Objects for Grasping Katherine Kuchenbecker & Maxim Likhachev Tracking People in Cluttered Spaces for Navigation in Dynamic Environment Maxim Likhachev Transferring Natural Handheld Objects between PR2 and Human and other Robots Mark Yim Planning for Autonomous Opening of Spring-Loaded Doors CJ Taylor & Mark Yim Support for Modular End Effectors on PR2 Maxim Likhachev Vijay Kumar & Maxim Likhachev Learning salient features for better perceptual processing by PR2 Dan Lee
4 Planning for Autonomous Opening of Spring-Loaded Doors Maxim Likhachev Motivation: Spring loaded doors are all around us! So the PR2 can use fire exits in case of an emergency Help save old people & children Save Itself Goal: A principled approach to: plan a complete motion to open a spring loaded door using the arm(s) and base of the robot collision-free trajectory for the complete robot body can be used on any door or cabinet provides completeness & suboptimality guarantees
5 Planning for Autonomous Opening of Spring-Loaded Doors Benjamin Cohen, Maxim Likhachev Planning for Autonomous Door Opening with a Mobile Manipulator Sachin Chitta, Benjamin Cohen, Maxim Likhachev ICRA 2010

6 Transferring Natural Handheld Objects between PR2 and Human and other Robots Joe Romano, Katherine Kuchenbecker In order to move robots into the home they need to interact naturally with people. Passing objects to a human, and receiving objects passed from a human, constitute a basic but important robot skill. It is important to follow social conventions: passing at the right speed passing or accepting when the human is ready...without violating the mechanical constraints of the interaction: letting go when the human is ready applying and releasing stable grasps We plan to use tactile cues, such as contact acceleration signals, to detect important events in the interaction.




7 Pennochio Project to Establish Telepresence through PR2 CJ Taylor, Mark Yim + Explore using the PR2 for immersive teleoperation Leverage inexpensive Head Mounted Displays Slave Pan Tilt head to real-time motion capture Map motion of user onto motion of base and arms Develop hand held manipulative units to control motion of the grippers and to provide haptic feedback Archive motion and sensor data for use in teaching by example systems Explore use of low cost Markerless Motion capture Some Related Projects: + MARIONET UT Austin Interaction Lab - USC
8 Support for Modular End Effectors on PR2 Mark Yim Goal: Change end effectors to suit tasks Issues: What types of end effectors would be useful? Gravity compensation in arm requires same moment/mass from end-effector Low level software requires modification to handle change in hardware state High level ROS PR2 interface needs to support endeffector types
9 Support for Modular End Effectors on PR2 Mark Yim
10 Planning for Navigation in Dynamic Environments Mike Phillips, Maxim Likhachev Motivation Dynamic Obstacles are all around us! Household tasks require navigation around people and pets Problem Given: Map of the static environment Pose of the robot and goal Predicted trajectories of dynamic obstacles Output: A time parameterized path that gets the robot safely to the goal

11 Planning for Navigation in Dynamic Environments Mike Phillips, Maxim Likhachev A common approach is to treat dynamic obstacles as static and replan often This is fast but lacks optimality and completeness Another approach adds a time dimension to the search space Is optimal and complete but very slow due to increased dimensionality Our approach exploits the idea that dynamic obstacles generally occupy a small fraction of the environment We build planners that only use a time dimension when relevant Most of the space is free of dynamic obstacles This allows for fast planning times while still guaranteeing optimality and completeness
12 Planning for Navigation in Dynamic Environments Mike Phillips, Maxim Likhachev Time-bounded lattice for efficient planning in dynamic environment Aleksandr Kushleyev, Maxim Likhachev ICRA 2009
13 Planning for Navigation in Dynamic Environments Mike Phillips, Maxim Likhachev This planner will be run on the PR2 Planning times are all < 1 sec

14 Tracking People in Cluttered Spaces for Navigation in Dynamic Environment Jianbo Shi, Maxim Likhachev People are all around us! Household tasks require robots to identify and track people Tracking people can become more robust to occlusion if planning is used to predict trajectories people may follow
15 Tracking People in Cluttered Spaces for Navigation in Dynamic Environment Jianbo Shi, Maxim Likhachev




16 Visual Localization and Pose Estimation of Objects for Grasping Cody Phillips, Alex Toshev, Kostas Daniilidis Object recognition/localization 3D pose estimation Most approaches texture-based Exists problem objects Glasses, bottles, cups Shiny, transparent objects Shape-based approach Recognize by shape Learn from 3D model library


17 Visual Localization and Pose Estimation of Objects for Grasping Cody Phillips, Alex Toshev, Kostas Daniilidis Grasping By Shape (Single Image) Extract 2D views from 3D models Compute shape descriptors Hypothesize object and pose Shapes Match? Recover Pose!


")


18 Visual Localization and Pose Estimation of Objects for Grasping Cody Phillips, Alex Toshev, Kostas Daniilidis Grasping By Shape (Video) Multiple object camera views Combine evidence from views Refine hypothesis space Hypotheses Geometrically Consistent
19 Planning & Controls for two-arm Manipulation Soonkyum Kim, Vijay Kumar, Maxim Likhachev Goal: Perform manipulation tasks that require two arm coordination Challenges: Maintain and control contacts between object and end effector Maintain force closure Rolling/sliding could occur Redundant system
20 Planning & Controls for two-arm Manipulation Soonkyum Kim, Vijay Kumar, Maxim Likhachev Cooperative Quasi-Static Planar Manipulation with Multiple Robots. Quentin J. Lindsey, Michael Shomin, and Vijay Kumar. IDETC 2010
21 Planning & Controls for two-arm Manipulation Soonkyum Kim, Vijay Kumar, Maxim Likhachev A general paradigm for control: Control for trajectory + control for contact Nonlinear feedback controller Planning: Partition of the configuration space Construct compact graph Search-based planning

22 Thank You!
Modeling and Control of Trawl Systems
 Modeling and Control of Trawl Systems Karl-Johan Reite, SINTEF Fisheries and Aquaculture Supervisor: Professor A. J. Sørensen * Advisor: Professor H. Ellingsen * * Norwegian University of Science and Technology
Modeling and Control of Trawl Systems Karl-Johan Reite, SINTEF Fisheries and Aquaculture Supervisor: Professor A. J. Sørensen * Advisor: Professor H. Ellingsen * * Norwegian University of Science and Technology
Penn Vet s New Bolton Center Launches Revolutionary Robotics-Controlled Equine Imaging System New technology will benefit animals and humans
 Contacts: Louisa Shepard, Communications Specialist for New Bolton Center 610-925-6241, lshepard@vet.upenn.edu Ashley Berke, Penn Vet Director of Communications 215-898-1475, berke@vet.upenn.edu For Immediate
Contacts: Louisa Shepard, Communications Specialist for New Bolton Center 610-925-6241, lshepard@vet.upenn.edu Ashley Berke, Penn Vet Director of Communications 215-898-1475, berke@vet.upenn.edu For Immediate
Shepherding Behaviors with Multiple Shepherds
 Shepherding Behaviors with Multiple Shepherds Jyh-Ming Lien Parasol Lab, Texas A&M neilien@cs.tamu.edu Samuel Rodríguez Parasol Lab, Texas A&M sor8786@cs.tamu.edu Jean-Phillipe Malric IMERIR, Univ. Perpignan,
Shepherding Behaviors with Multiple Shepherds Jyh-Ming Lien Parasol Lab, Texas A&M neilien@cs.tamu.edu Samuel Rodríguez Parasol Lab, Texas A&M sor8786@cs.tamu.edu Jean-Phillipe Malric IMERIR, Univ. Perpignan,
The integration of dogs into collaborative humanrobot. - An applied ethological approach - PhD Thesis. Linda Gerencsér Supervisor: Ádám Miklósi
 Eötvös Loránd University, Budapest Doctoral School of Biology, Head: Anna Erdei, DSc Doctoral Program of Ethology, Head: Ádám Miklósi, DSc The integration of dogs into collaborative humanrobot teams -
Eötvös Loránd University, Budapest Doctoral School of Biology, Head: Anna Erdei, DSc Doctoral Program of Ethology, Head: Ádám Miklósi, DSc The integration of dogs into collaborative humanrobot teams -
Path Diversity Is Only Part of the Problem
 Path Diversity Is Only Part of the Problem Ross A. Knepper and Matthew T. Mason Abstract The goal of motion planning is to find a feasible path that connects two positions and is free from collision with
Path Diversity Is Only Part of the Problem Ross A. Knepper and Matthew T. Mason Abstract The goal of motion planning is to find a feasible path that connects two positions and is free from collision with
Trebuchet Launch Activity How Far Does It Go? Worksheet
 Background Trebuchet Launch Activity How Far Does It Go? Worksheet In medieval times, the trebuchet was used as both a weapon and a supply engine because it could launch objects to those in need. The powerful
Background Trebuchet Launch Activity How Far Does It Go? Worksheet In medieval times, the trebuchet was used as both a weapon and a supply engine because it could launch objects to those in need. The powerful
Trends and challenges in Engineering geodesy
 Trends and challenges in Engineering geodesy Rudolf STAIGER rudolf.staiger@hs-bochum.de International Federation of Surveyors Féderation Internationale des Géomètres Internationale Vereinigung der Vermessungsingenieure
Trends and challenges in Engineering geodesy Rudolf STAIGER rudolf.staiger@hs-bochum.de International Federation of Surveyors Féderation Internationale des Géomètres Internationale Vereinigung der Vermessungsingenieure
Elicia Calhoun Seminar for Mobility Challenged Handlers PART 2
 Elicia Calhoun Seminar for Mobility Challenged Handlers Independent obstacle performance: PART 2 With each of the agility obstacles Elicia took us back to basics. She stressed one goal: the dog should
Elicia Calhoun Seminar for Mobility Challenged Handlers Independent obstacle performance: PART 2 With each of the agility obstacles Elicia took us back to basics. She stressed one goal: the dog should
DIFFERENTIATING BETWEEN SERVICE
 DIFFERENTIATING BETWEEN SERVICE DOGS AND THERAPY DOGS Differentiating between service dogs and therapy dogs is not a matter of splitting hairs or political correctness. Each classification has a very different
DIFFERENTIATING BETWEEN SERVICE DOGS AND THERAPY DOGS Differentiating between service dogs and therapy dogs is not a matter of splitting hairs or political correctness. Each classification has a very different
Shepherding Behaviors with Multiple Shepherds
 Shepherding Behaviors with Multiple Shepherds Jyh-Ming Lien Samuel Rodríguez neilien@cs.tamu.edu sor8786@cs.tamu.edu Jean-Phillipe Malric Nancy M. Amato sowelrt0@sewanee.edu amato@cs.tamu.edu Technical
Shepherding Behaviors with Multiple Shepherds Jyh-Ming Lien Samuel Rodríguez neilien@cs.tamu.edu sor8786@cs.tamu.edu Jean-Phillipe Malric Nancy M. Amato sowelrt0@sewanee.edu amato@cs.tamu.edu Technical
Dynamic Programming for Linear Time Incremental Parsing
 Dynamic Programming for Linear Time ncremental Parsing Liang Huang nformation Sciences nstitute University of Southern California Kenji Sagae nstitute for Creative Technologies University of Southern California
Dynamic Programming for Linear Time ncremental Parsing Liang Huang nformation Sciences nstitute University of Southern California Kenji Sagae nstitute for Creative Technologies University of Southern California
Your web browser (Safari 7) is out of date. For more security, comfort and the best experience on this site: Update your browser Ignore
 is out of date. For more security, comfort and the best experience on this site: Update your browser Ignore") Your web browser (Safari 7) is out of date. For more security, comfort and the best experience on this site: Update your browser Ignore Activitydevelop TRACK L EATHERBACK SEA TU RTL ES What routes do leatherback
Your web browser (Safari 7) is out of date. For more security, comfort and the best experience on this site: Update your browser Ignore Activitydevelop TRACK L EATHERBACK SEA TU RTL ES What routes do leatherback
Improving AIBO with Artificial Intelligence Technique
 Improving AIBO with Artificial Intelligence Technique Gun A. Lee endovert@postech.ac.kr Virtual Reality and Interactive Media Laboratory, Department of Computer Science & Engineering, POSTECH, Pohang,
Improving AIBO with Artificial Intelligence Technique Gun A. Lee endovert@postech.ac.kr Virtual Reality and Interactive Media Laboratory, Department of Computer Science & Engineering, POSTECH, Pohang,
SOAR Research Proposal Summer How do sand boas capture prey they can t see?
 SOAR Research Proposal Summer 2016 How do sand boas capture prey they can t see? Faculty Mentor: Dr. Frances Irish, Assistant Professor of Biological Sciences Project start date and duration: May 31, 2016
SOAR Research Proposal Summer 2016 How do sand boas capture prey they can t see? Faculty Mentor: Dr. Frances Irish, Assistant Professor of Biological Sciences Project start date and duration: May 31, 2016
Teaching Assessment Lessons
 DOG TRAINER PROFESSIONAL Lesson 19 Teaching Assessment Lessons The lessons presented here reflect the skills and concepts that are included in the KPA beginner class curriculum (which is provided to all
DOG TRAINER PROFESSIONAL Lesson 19 Teaching Assessment Lessons The lessons presented here reflect the skills and concepts that are included in the KPA beginner class curriculum (which is provided to all
FPGA-based Emotional Behavior Design for Pet Robot
 FPGA-based Emotional Behavior Design for Pet Robot Chi-Tai Cheng, Shih-An Li, Yu-Ting Yang, and Ching-Chang Wong Department of Electrical Engineering, Tamkang University 151, Ying-Chuan Road, Tamsui, Taipei
FPGA-based Emotional Behavior Design for Pet Robot Chi-Tai Cheng, Shih-An Li, Yu-Ting Yang, and Ching-Chang Wong Department of Electrical Engineering, Tamkang University 151, Ying-Chuan Road, Tamsui, Taipei
Grade: 8. Author: Hope Phillips
 Title: Fish Aquariums Real-World Connection: Grade: 8 Author: Hope Phillips BIG Idea: Linear Functions Fish aquariums can be found in homes, restaurants, and businesses. From simple goldfish to exotic
Title: Fish Aquariums Real-World Connection: Grade: 8 Author: Hope Phillips BIG Idea: Linear Functions Fish aquariums can be found in homes, restaurants, and businesses. From simple goldfish to exotic
Naughty But Nice. minute. 3gamechangers
 Naughty But Nice minute 3gamechangers 1. cone game To play this game, all you need is a plastic cone or cup that your dog can fit their muzzle in and their dinner! In this game, you reward your dog for
Naughty But Nice minute 3gamechangers 1. cone game To play this game, all you need is a plastic cone or cup that your dog can fit their muzzle in and their dinner! In this game, you reward your dog for
Effects of Cage Stocking Density on Feeding Behaviors of Group-Housed Laying Hens
 AS 651 ASL R2018 2005 Effects of Cage Stocking Density on Feeding Behaviors of Group-Housed Laying Hens R. N. Cook Iowa State University Hongwei Xin Iowa State University, hxin@iastate.edu Recommended
AS 651 ASL R2018 2005 Effects of Cage Stocking Density on Feeding Behaviors of Group-Housed Laying Hens R. N. Cook Iowa State University Hongwei Xin Iowa State University, hxin@iastate.edu Recommended
Entertainment Robot aibo Announced
 News & Information Entertainment Robot aibo Announced Sony Corporation 1-7-1 Konan, Minato-ku, Tokyo No. 17-105E November 1, 2017 Tokyo November 1, 2017 - Sony Corporation (Sony) is today proud to announce
News & Information Entertainment Robot aibo Announced Sony Corporation 1-7-1 Konan, Minato-ku, Tokyo No. 17-105E November 1, 2017 Tokyo November 1, 2017 - Sony Corporation (Sony) is today proud to announce
POLICE K9 UNIVERSITY 2016 NINO DROWAERT ALL RIGHTS RESERVED
 POLICE K9 UNIVERSITY Police K9 University is an exclusive training program for law enforcement, military and security agencies. Nino s unique crossover from a high level dog sports background transcending
POLICE K9 UNIVERSITY Police K9 University is an exclusive training program for law enforcement, military and security agencies. Nino s unique crossover from a high level dog sports background transcending
Development of Design of Initial Cat Robot Model for the Use of Early Treatment of Children with Autism Spectrum Disorder (ASD)
") , pp.90-96 http://dx.doi.org/10.14257/astl.2014.52.16 Development of Design of Initial Cat Robot Model for the Use of Early Treatment of Children with Autism Spectrum Disorder (ASD) Keum Hi Mun 1, Ja Young
, pp.90-96 http://dx.doi.org/10.14257/astl.2014.52.16 Development of Design of Initial Cat Robot Model for the Use of Early Treatment of Children with Autism Spectrum Disorder (ASD) Keum Hi Mun 1, Ja Young
Lab Assignment #1: Clicker Training.
 24 Lab Assignment #1: Clicker Training. Important things to remember: Clicker training is a system of training/teaching that uses positive reinforcement in combination with an event marker. The event marker
24 Lab Assignment #1: Clicker Training. Important things to remember: Clicker training is a system of training/teaching that uses positive reinforcement in combination with an event marker. The event marker
Lab 7. Evolution Lab. Name: General Introduction:
 Lab 7 Name: Evolution Lab OBJECTIVES: Help you develop an understanding of important factors that affect evolution of a species. Demonstrate important biological and environmental selection factors that
Lab 7 Name: Evolution Lab OBJECTIVES: Help you develop an understanding of important factors that affect evolution of a species. Demonstrate important biological and environmental selection factors that
Simrad ITI Trawl monitoring system
 Simrad ITI Trawl monitoring system Measures position of signel and twin trawls Full range of sensors Split beam transducer technology Nine display modes of efficient use Well proven technology Locate lost
Simrad ITI Trawl monitoring system Measures position of signel and twin trawls Full range of sensors Split beam transducer technology Nine display modes of efficient use Well proven technology Locate lost
Application system. Size and weight reduction of the mechanical unit for a more lightweight and compact robot.
 The FANUC R-2000iC robot is a multi-purpose intelligent robot based on FANUC s years of experience and renowned technology. This high performance intelligent robot with outstanding reliability and cost
The FANUC R-2000iC robot is a multi-purpose intelligent robot based on FANUC s years of experience and renowned technology. This high performance intelligent robot with outstanding reliability and cost
Kibble. Team and Roles. Problem and Solution Overview. Contextual Inquiry Target, Stakeholders, and Participants
 Kibble Team and Roles Jeff Souza: ideation, contextual inquiries, writing Hoon Ik Cho: UI sketches, writing Chaofeng Zhou: UI design, writing Xuanyang Luo: storyboarding Problem and Solution Overview Raising
Kibble Team and Roles Jeff Souza: ideation, contextual inquiries, writing Hoon Ik Cho: UI sketches, writing Chaofeng Zhou: UI design, writing Xuanyang Luo: storyboarding Problem and Solution Overview Raising
Controllability of Complex Networks. Yang-Yu Liu, Jean-Jacques Slotine, Albert-Laszlo Barbasi Presented By Arindam Bhattacharya
 Controllability of Complex Networks Yang-Yu Liu, Jean-Jacques Slotine, Albert-Laszlo Barbasi Presented By Arindam Bhattacharya Index Overview Network Controllability Controllability of real networks An
Controllability of Complex Networks Yang-Yu Liu, Jean-Jacques Slotine, Albert-Laszlo Barbasi Presented By Arindam Bhattacharya Index Overview Network Controllability Controllability of real networks An
Biol 160: Lab 7. Modeling Evolution
 Name: Modeling Evolution OBJECTIVES Help you develop an understanding of important factors that affect evolution of a species. Demonstrate important biological and environmental selection factors that
Name: Modeling Evolution OBJECTIVES Help you develop an understanding of important factors that affect evolution of a species. Demonstrate important biological and environmental selection factors that
NBN 3MIN GAME CHANGERS
 NBN 3MIN GAME CHANGERS DOGS WHO HAVE LESS PREDICTABLE SCHEDULES ARE MUCH HAPPIER IN THEIR EVERYDAY LIFE STOP WORRYING ABOUT WHAT CAN GO WRONG, GET EXCITED ABOUT WHAT WILL GO RIGHT! absolutedogstraining.com
NBN 3MIN GAME CHANGERS DOGS WHO HAVE LESS PREDICTABLE SCHEDULES ARE MUCH HAPPIER IN THEIR EVERYDAY LIFE STOP WORRYING ABOUT WHAT CAN GO WRONG, GET EXCITED ABOUT WHAT WILL GO RIGHT! absolutedogstraining.com
funded by Reducing antibiotics in pig farming
 funded by Reducing antibiotics in pig farming The widespread use of antibiotics (also known as antibacterials) in human and animal medicine increases the level of resistant bacteria. This makes it more
funded by Reducing antibiotics in pig farming The widespread use of antibiotics (also known as antibacterials) in human and animal medicine increases the level of resistant bacteria. This makes it more
Configuring and Using CATS
 Manuel Gallardo Configuring and Using CATS Bonn Boston Contents Acknowledgments... 9 1 Introduction... 11 1.1 The Purpose of This Book... 11 1.2 CATS User Interfaces... 12 1.3 System Enhancements... 14
Manuel Gallardo Configuring and Using CATS Bonn Boston Contents Acknowledgments... 9 1 Introduction... 11 1.1 The Purpose of This Book... 11 1.2 CATS User Interfaces... 12 1.3 System Enhancements... 14
RALLY-O Sign Commands
 RALLY-O Sign Commands 1 Start - Indicates the beginning of the course. Dog does not have to be sitting at start. 2. Finish - Indicates the end of the course timing stops. 3. Halt - Sit - While heeling,
RALLY-O Sign Commands 1 Start - Indicates the beginning of the course. Dog does not have to be sitting at start. 2. Finish - Indicates the end of the course timing stops. 3. Halt - Sit - While heeling,
PIGEON DISCRIMINATION OF PAINTINGS 1
 PIGEON DISCRIMINATION OF PAINTINGS 1 Pigeon Discrimination of Paintings by Image Sharpness ANONYMOUS Psychology and 20th Century Literature August 8th, 2016 PIGEON DISCRIMINATION OF PAINTINGS 2 Pigeon
PIGEON DISCRIMINATION OF PAINTINGS 1 Pigeon Discrimination of Paintings by Image Sharpness ANONYMOUS Psychology and 20th Century Literature August 8th, 2016 PIGEON DISCRIMINATION OF PAINTINGS 2 Pigeon
2018 Summer Immersion Program for Students and Practitioners of Companion Animal Veterinary Medicine TILLS ANIMAL HEALTH
 2018 Summer Immersion Program for Students and Practitioners of Companion Animal Veterinary Medicine TILLS ANIMAL HEALTH An opportunity to Experience US-style veterinary education at a premier US veterinary
2018 Summer Immersion Program for Students and Practitioners of Companion Animal Veterinary Medicine TILLS ANIMAL HEALTH An opportunity to Experience US-style veterinary education at a premier US veterinary
Requirements for the employment as helper in phase C
 GSSCC - Raino Fluegge, President Page 1 of 8 A.) Requirements for the employment as helper in phase C 1. The guidelines and regulations of the trial regulations regarding helper work must be followed.
GSSCC - Raino Fluegge, President Page 1 of 8 A.) Requirements for the employment as helper in phase C 1. The guidelines and regulations of the trial regulations regarding helper work must be followed.
Representation, Visualization and Querying of Sea Turtle Migrations Using the MLPQ Constraint Database System
 Representation, Visualization and Querying of Sea Turtle Migrations Using the MLPQ Constraint Database System SEMERE WOLDEMARIAM and PETER Z. REVESZ Department of Computer Science and Engineering University
Representation, Visualization and Querying of Sea Turtle Migrations Using the MLPQ Constraint Database System SEMERE WOLDEMARIAM and PETER Z. REVESZ Department of Computer Science and Engineering University
VETERINARY TOXICOLOGY INFORMATION SYSTEM
 TASK QUARTERLY 8 No 2(2004), 297 301 VETERINARY TOXICOLOGY INFORMATION SYSTEM ANDRZEJ KLUZA Department of Econometrics and Computer Sciences, Faculty of Agricultural Economics, Warsaw Agricultural University,
TASK QUARTERLY 8 No 2(2004), 297 301 VETERINARY TOXICOLOGY INFORMATION SYSTEM ANDRZEJ KLUZA Department of Econometrics and Computer Sciences, Faculty of Agricultural Economics, Warsaw Agricultural University,
Sexy smells Featured scientist: Danielle Whittaker from Michigan State University
 Sexy smells Featured scientist: Danielle Whittaker from Michigan State University Research Background: Animals collect information about each other and the rest of the world using multiple senses, including
Sexy smells Featured scientist: Danielle Whittaker from Michigan State University Research Background: Animals collect information about each other and the rest of the world using multiple senses, including
ABSTRACT. This paper describes the project with emphasis on the dog-collar hardware, behavior-classification software, and feasibility testing.
 Automatic behavior sensing for a bomb-detecting dog Hoa G. Nguyen*, Adam Nans, Kurt Talke, Paul Candela, H.R. Everett Space and Naval Warfare Systems Center Pacific San Diego, CA 92152 ABSTRACT Bomb-detecting
Automatic behavior sensing for a bomb-detecting dog Hoa G. Nguyen*, Adam Nans, Kurt Talke, Paul Candela, H.R. Everett Space and Naval Warfare Systems Center Pacific San Diego, CA 92152 ABSTRACT Bomb-detecting
Elicia Calhoun Seminar for Mobility Challenged Handlers PART 3
 Elicia Calhoun Seminar for Mobility Challenged Handlers Directional cues and self-control: PART 3 In order for a mobility challenged handler to compete successfully in agility, the handler must be able
Elicia Calhoun Seminar for Mobility Challenged Handlers Directional cues and self-control: PART 3 In order for a mobility challenged handler to compete successfully in agility, the handler must be able
Coding with Scratch - First Steps
 Getting started Starting the Scratch program To start using Scratch go to the web page at scratch.mit.edu. Page 1 When the page loads click on TRY IT OUT. Your Scratch screen should look something like
Getting started Starting the Scratch program To start using Scratch go to the web page at scratch.mit.edu. Page 1 When the page loads click on TRY IT OUT. Your Scratch screen should look something like
Pet Selective Automated Food Dispenser
 Pet Selective Automated Food Dispenser By Advika Battini Ali Yaqoob Vibhu Vanjari TA: Yuchen He Team Number: 46 Proposal for ECE 445, Senior Design, Spring 2018, University of Illinois Urbana Champaign
Pet Selective Automated Food Dispenser By Advika Battini Ali Yaqoob Vibhu Vanjari TA: Yuchen He Team Number: 46 Proposal for ECE 445, Senior Design, Spring 2018, University of Illinois Urbana Champaign
The S Files Success with Maria: Sunshine: Biting Reported by S.G. Friedman, PhD and L. McGuire
 The S Files Success with Maria: Sunshine: Biting Reported by S.G. Friedman, PhD and L. McGuire In Press, Good Bird Magazine Volume x(x), pp-pp The S Files are real case studies of behavior challenges faced
The S Files Success with Maria: Sunshine: Biting Reported by S.G. Friedman, PhD and L. McGuire In Press, Good Bird Magazine Volume x(x), pp-pp The S Files are real case studies of behavior challenges faced
Texas Task Force 1. FEMA Canine Search Specialist Certification Evaluation 12 Month Training Objectives
 Progress Check #1 Wk 8 Obedience Immediate down (or sit) while K9 is off lead and approximately 10 feet away, perform 3 times Obedience Heels on loose lead changing direction and changing pace, right turn,
Progress Check #1 Wk 8 Obedience Immediate down (or sit) while K9 is off lead and approximately 10 feet away, perform 3 times Obedience Heels on loose lead changing direction and changing pace, right turn,
The search space of the rat during whisking behavior
 214. Published by The Company of iologists Ltd (214) 217, 3365-3376 doi:1.1242/jeb.15338 RESERCH RTICLE The search space of the rat during whisking behavior Lucie. Huet 1 and Mitra J. Z. Hartmann 1,2,
214. Published by The Company of iologists Ltd (214) 217, 3365-3376 doi:1.1242/jeb.15338 RESERCH RTICLE The search space of the rat during whisking behavior Lucie. Huet 1 and Mitra J. Z. Hartmann 1,2,
Subdomain Entry Vocabulary Modules Evaluation
 Subdomain Entry Vocabulary Modules Evaluation Technical Report Vivien Petras August 11, 2000 Abstract: Subdomain entry vocabulary modules represent a way to provide a more specialized retrieval vocabulary
Subdomain Entry Vocabulary Modules Evaluation Technical Report Vivien Petras August 11, 2000 Abstract: Subdomain entry vocabulary modules represent a way to provide a more specialized retrieval vocabulary
Complete Solutions for BROILER BREEDERS
 Complete Solutions for BROILER BREEDERS Global Presence Local Commitment Feeding Drinking Climate Housing Complete Broiler Breeder Packages Broiler-Breeders We at Plasson are aware that the main goal in
Complete Solutions for BROILER BREEDERS Global Presence Local Commitment Feeding Drinking Climate Housing Complete Broiler Breeder Packages Broiler-Breeders We at Plasson are aware that the main goal in
Our class had 2 incubators full of eggs. On day 21, our chicks began to hatch. In incubator #1, 1/3 of the eggs hatched. There were 2 chicks.
 Our class had 2 incubators full of eggs. On day 21, our chicks began to hatch. In incubator #1, 1/3 of the eggs hatched. There were 2 chicks. How many eggs were in the incubator before hatching? How many
Our class had 2 incubators full of eggs. On day 21, our chicks began to hatch. In incubator #1, 1/3 of the eggs hatched. There were 2 chicks. How many eggs were in the incubator before hatching? How many
THE PECO BONING AID A TECHNOLOGICAL ENHANCEMENT OF BEEF QUARTER BONING PRODUCTIVITY
 THE PECO BONING AID THE PECO BONING AID A TECHNOLOGICAL ENHANCEMENT OF BEEF QUARTER BONING PRODUCTIVITY Traditional beef quarter boning techniques have largely remained unchanged for decades. Recent technological
THE PECO BONING AID THE PECO BONING AID A TECHNOLOGICAL ENHANCEMENT OF BEEF QUARTER BONING PRODUCTIVITY Traditional beef quarter boning techniques have largely remained unchanged for decades. Recent technological
Psy Advanced Laboratory in Operant Behavior Dognition Laboratory One. I. Let s see how well your dog can observe pointing signals.
 Psy 331.03 Advanced Laboratory in Operant Behavior Dognition Laboratory One Research Team: Dog: I. Let s see how well your dog can observe pointing signals. Procedure: 1. You will need treats, 2 cones,
Psy 331.03 Advanced Laboratory in Operant Behavior Dognition Laboratory One Research Team: Dog: I. Let s see how well your dog can observe pointing signals. Procedure: 1. You will need treats, 2 cones,
Finch Robot: snap levels 1-3
 Finch Robot: snap levels 1-3 copyright 2017 birdbrain technologies llc the finch is a great way to get started with programming. we'll use snap!, a visual programming language, to control our finch. First,
Finch Robot: snap levels 1-3 copyright 2017 birdbrain technologies llc the finch is a great way to get started with programming. we'll use snap!, a visual programming language, to control our finch. First,
Cattle RFID. Partners
 Cattle RFID & Monitoring Solution Partners November 2017 CONTENTS INTRODUCTION 3 HOW THE SYSTEM WORKS 5 ADVANTAGES & BENEFITS 7 RFID PROCESS CENTERS 9 PRICING 9 NUMBERING SYSTEM 11 FREQUENTLY ASKED QUESTIONS
Cattle RFID & Monitoring Solution Partners November 2017 CONTENTS INTRODUCTION 3 HOW THE SYSTEM WORKS 5 ADVANTAGES & BENEFITS 7 RFID PROCESS CENTERS 9 PRICING 9 NUMBERING SYSTEM 11 FREQUENTLY ASKED QUESTIONS
Active sensing. Ehud Ahissar
 Active sensing Ehud Ahissar 1 Active sensing Passive vs active sensing (touch) Comparison across senses Basic coding principles -------- Perceptual loops Sensation-targeted motor control Proprioception
Active sensing Ehud Ahissar 1 Active sensing Passive vs active sensing (touch) Comparison across senses Basic coding principles -------- Perceptual loops Sensation-targeted motor control Proprioception
Tntibiotic resistance is a growing problem and the main cause of this problem is misuse
 AIHA Internet Resources Digest Supporting Access to High Quality Online Resources June 2015 Spotlight on: Resources on Rational Antibiotic Use Tntibiotic resistance is a growing problem and the main cause
AIHA Internet Resources Digest Supporting Access to High Quality Online Resources June 2015 Spotlight on: Resources on Rational Antibiotic Use Tntibiotic resistance is a growing problem and the main cause
Improving the Safety of Telerobotic Drilling of the Skull Base via Photoacoustic Sensing of the Carotid Arteries
 Improving the Safety of Telerobotic Drilling of the Skull Base via Photoacoustic Sensing of the Carotid Arteries Sungmin Kim, Neeraj Gandhi, Muyinatu A. Lediju Bell, and Peter Kazanzides Abstract One of
Improving the Safety of Telerobotic Drilling of the Skull Base via Photoacoustic Sensing of the Carotid Arteries Sungmin Kim, Neeraj Gandhi, Muyinatu A. Lediju Bell, and Peter Kazanzides Abstract One of
Our training program... 4
 1 Introduction Agility truly is the ultimate dog sport! It combines speed and precision, teamwork and independence, dog training skills and handler finesse in a wonderfully complex mix. Agility has the
1 Introduction Agility truly is the ultimate dog sport! It combines speed and precision, teamwork and independence, dog training skills and handler finesse in a wonderfully complex mix. Agility has the
Poultry in behaviour research.
 Poultry in behaviour research. Prof Chris Evans & Dr K-lynn Smith Department of Brain, Behaviour and Evolution Macquarie University : Applied research Industry & Economic Bird health & productivity Stress,
Poultry in behaviour research. Prof Chris Evans & Dr K-lynn Smith Department of Brain, Behaviour and Evolution Macquarie University : Applied research Industry & Economic Bird health & productivity Stress,
Comparative Analysis of Adders Parallel-Prefix Adder for Their Area, Delay and Power Consumption
 2018 IJSRST Volume 4 Issue 5 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology Comparative Analysis of Adders Parallel-Prefix Adder for Their Area, Delay and Power Consumption
2018 IJSRST Volume 4 Issue 5 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology Comparative Analysis of Adders Parallel-Prefix Adder for Their Area, Delay and Power Consumption
Programming and Installation Guide. PPA Microchip Cat Flap. Series. Please read this entire guide before beginning.
 Programming and Installation Guide PPA44-16427 Microchip Cat Flap Please read this entire guide before beginning. 100 Series Hereinafter Radio Systems Corporation, Radio Systems PetSafe Europe Ltd., Radio
Programming and Installation Guide PPA44-16427 Microchip Cat Flap Please read this entire guide before beginning. 100 Series Hereinafter Radio Systems Corporation, Radio Systems PetSafe Europe Ltd., Radio
Turtle Ballet: Simulating Parallel Turtles in a Nonparallel LOGO Version. Erich Neuwirth
 Turtle Ballet: Simulating Parallel Turtles in a Nonparallel LOGO Version Erich Neuwirth University of Vienna, Dept. of Statistics and Decision Support Systems Computer Supported Didactics Working Group
Turtle Ballet: Simulating Parallel Turtles in a Nonparallel LOGO Version Erich Neuwirth University of Vienna, Dept. of Statistics and Decision Support Systems Computer Supported Didactics Working Group
STUDY BEHAVIOR OF CERTAIN PARAMETERS AFFECTING ASSESSMENT OF THE QUALITY OF QUAIL EGGS BY COMPUTER VISION SYSTEM
 STUDY BEHAVIOR OF CERTAIN PARAMETERS AFFECTING ASSESSMENT OF THE QUALITY OF QUAIL EGGS BY COMPUTER VISION SYSTEM Zlatin Zlatev, Veselina Nedeva Faculty of Technics and Technologies, Trakia University Graf
STUDY BEHAVIOR OF CERTAIN PARAMETERS AFFECTING ASSESSMENT OF THE QUALITY OF QUAIL EGGS BY COMPUTER VISION SYSTEM Zlatin Zlatev, Veselina Nedeva Faculty of Technics and Technologies, Trakia University Graf
Finch Robot: snap level 4
 Finch Robot: snap level 4 copyright 2017 birdbrain technologies llc the finch is a great way to get started with programming. we'll use snap!, a visual programming language, to control our finch. First,
Finch Robot: snap level 4 copyright 2017 birdbrain technologies llc the finch is a great way to get started with programming. we'll use snap!, a visual programming language, to control our finch. First,
RALLY SIGNS AND DESCRIPTIONS. The principal parts of the exercises are boldface and underlined.
 RALLY SIGNS AND DESCRIPTIONS Designated wording and symbols for rally signs Judges may use duplicates of stations marked with an asterisk in designing their courses. The principal parts of the exercises
RALLY SIGNS AND DESCRIPTIONS Designated wording and symbols for rally signs Judges may use duplicates of stations marked with an asterisk in designing their courses. The principal parts of the exercises
5 State of the Turtles
 CHALLENGE 5 State of the Turtles In the previous Challenges, you altered several turtle properties (e.g., heading, color, etc.). These properties, called turtle variables or states, allow the turtles to
CHALLENGE 5 State of the Turtles In the previous Challenges, you altered several turtle properties (e.g., heading, color, etc.). These properties, called turtle variables or states, allow the turtles to
Be Doggone Smart at Work
 Be Doggone Smart at Work Safety training for dog bite prevention on the job No part of this demo may be copied or used for public presentation or training purposes. This is a free introductory demo containing
Be Doggone Smart at Work Safety training for dog bite prevention on the job No part of this demo may be copied or used for public presentation or training purposes. This is a free introductory demo containing
Rear Crosses with Drive and Confidence
 Rear Crosses with Drive and Confidence Article and photos by Ann Croft Is it necessary to be able to do rear crosses on course to succeed in agility? I liken the idea of doing agility without the option
Rear Crosses with Drive and Confidence Article and photos by Ann Croft Is it necessary to be able to do rear crosses on course to succeed in agility? I liken the idea of doing agility without the option
Nathan A. Thompson, Ph.D. Adjunct Faculty, University of Cincinnati Vice President, Assessment Systems Corporation
 An Introduction to Computerized Adaptive Testing Nathan A. Thompson, Ph.D. Adjunct Faculty, University of Cincinnati Vice President, Assessment Systems Corporation Welcome! CAT: tests that adapt to each
An Introduction to Computerized Adaptive Testing Nathan A. Thompson, Ph.D. Adjunct Faculty, University of Cincinnati Vice President, Assessment Systems Corporation Welcome! CAT: tests that adapt to each
SMARTKITTY SELFCLEANING LITTER BOX
 SMARTKITTY SELFCLEANING LITTER BOX List of content 1Introduction... 2 Copyrights... 2 Safety hazards... 3 Size and weight of SmartKitty litter... 4 Litter box modules... 5 Start-up procedure... 5 Operating
SMARTKITTY SELFCLEANING LITTER BOX List of content 1Introduction... 2 Copyrights... 2 Safety hazards... 3 Size and weight of SmartKitty litter... 4 Litter box modules... 5 Start-up procedure... 5 Operating
Drive More Efficient Clinical Action by Streamlining the Interpretation of Test Results
 White Paper: Templated Report Comments Drive More Efficient Clinical Action by Streamlining the Interpretation of Test Results Background The availability of rapid, multiplexed technologies for the comprehensive
White Paper: Templated Report Comments Drive More Efficient Clinical Action by Streamlining the Interpretation of Test Results Background The availability of rapid, multiplexed technologies for the comprehensive
Imagine. AIBO will become, in fact, your best friend.
 Imagine. The fascinating AIBO concept is part of the very conscious ambition from Sony to create intelligent companions for people. To achieve this, a groundbreaking vision to combine Sony fl agship technologies
Imagine. The fascinating AIBO concept is part of the very conscious ambition from Sony to create intelligent companions for people. To achieve this, a groundbreaking vision to combine Sony fl agship technologies
The City School. Learn Create Program
 Learn Create Program What is Scratch? Scratch is a free programmable toolkit that enables kids to create their own games, animated stories, and interactive art share their creations with one another over
Learn Create Program What is Scratch? Scratch is a free programmable toolkit that enables kids to create their own games, animated stories, and interactive art share their creations with one another over
PALFINGER on the tracks
 PLFINGER on the tracks PLFINGER railway equipment optimally matched to the vehicle and its purpose PLFINGER railway equipment is uncompromisingly designed for the conditions of duty on a railway track.
PLFINGER on the tracks PLFINGER railway equipment optimally matched to the vehicle and its purpose PLFINGER railway equipment is uncompromisingly designed for the conditions of duty on a railway track.
LOOX 12 V ESSENTIALS
 PLUG AND PLAY LOOX 12 V ESSENTIALS KNOWLEDGE CREATES OPPORTUNITIES. www.hafele.co.nz ENGINEERED BY LOOX LED 2025 IDEALLY SUITED FOR TASK LIGHTING OR AS AN ALL PURPOSE DOWN LIGHT RECESS OR SURFACE MOUNTED
PLUG AND PLAY LOOX 12 V ESSENTIALS KNOWLEDGE CREATES OPPORTUNITIES. www.hafele.co.nz ENGINEERED BY LOOX LED 2025 IDEALLY SUITED FOR TASK LIGHTING OR AS AN ALL PURPOSE DOWN LIGHT RECESS OR SURFACE MOUNTED
Good Health Records Setup Guide for DHI Plus Health Event Users
 Outcomes Driven Health Management Good Health Records Setup Guide for DHI Plus Health Event Users A guide to setting up recording practices for the major diseases of dairy cattle on the farm Dr. Sarah
Outcomes Driven Health Management Good Health Records Setup Guide for DHI Plus Health Event Users A guide to setting up recording practices for the major diseases of dairy cattle on the farm Dr. Sarah
Intro to Animal Assisted Therapy KPETS Keystone Pet Enhanced Therapy Services AAT vs AAA Both AAA and AAT Animals and handlers are screened and
 Intro to Animal Assisted Therapy KPETS Keystone Pet Enhanced Therapy Services AAT vs AAA Both AAA and AAT Animals and handlers are screened and trained AAA Animal Assisted Activities Animals and handlers
Intro to Animal Assisted Therapy KPETS Keystone Pet Enhanced Therapy Services AAT vs AAA Both AAA and AAT Animals and handlers are screened and trained AAA Animal Assisted Activities Animals and handlers
2. FINISH - Indicates the end of the course - timing stops. 1. START - Indicates the beginning of the course.
 2. FINISH - Indicates the end of the course - timing stops. 1. START - Indicates the beginning of the course. 4. HALT - Sit - Down. While heeling, the handler halts and the dog comes to a sit. The handler
2. FINISH - Indicates the end of the course - timing stops. 1. START - Indicates the beginning of the course. 4. HALT - Sit - Down. While heeling, the handler halts and the dog comes to a sit. The handler
Physics Based Ragdoll Animation
 Physics Based Ragdoll Animation Arash Ghodsi & David Wilson Abstract Ragdoll animation is a technique used to add realism to falling bodies with multiple joints, such as a human model. Doing it right can
Physics Based Ragdoll Animation Arash Ghodsi & David Wilson Abstract Ragdoll animation is a technique used to add realism to falling bodies with multiple joints, such as a human model. Doing it right can
ANS 490-A: Ewe Lamb stemperament and Effects on Maze Entry, Exit Order and Coping Styles When Exposed to Novel Stimulus
 Animal Industry Report AS 663 ASL R3182 2017 ANS 490-A: Ewe Lamb stemperament and Effects on Maze Entry, Exit Order and Coping Styles When Exposed to Novel Stimulus Emily Strong Iowa State University Samaneh
Animal Industry Report AS 663 ASL R3182 2017 ANS 490-A: Ewe Lamb stemperament and Effects on Maze Entry, Exit Order and Coping Styles When Exposed to Novel Stimulus Emily Strong Iowa State University Samaneh
International Play Concepts B.V. PO box 29 NL-3890 AA Zeewolde The Netherlands. T: +31(0) E: W:
 E: W:") International Play Concepts B.V. PO box 29 NL-3890 AA Zeewolde The Netherlands T: +31(0)36-3000433 E: info@playipc.com W: www.playipc.com Index Projects & Index Page 2-3 Play Modules Page 12-13 LEGO Page
International Play Concepts B.V. PO box 29 NL-3890 AA Zeewolde The Netherlands T: +31(0)36-3000433 E: info@playipc.com W: www.playipc.com Index Projects & Index Page 2-3 Play Modules Page 12-13 LEGO Page
Interstate-5, Exit 260 Slater Road. Corridor Report and Preliminary Interchange Justification Evaluation
 Interstate-5, Exit 260 Slater Road Corridor Report and Preliminary Interchange Justification Evaluation August 2013 Prepared By: Gibson Traffic Consultants, Inc. 2802 Wetmore Avenue Suite 220 Everett,
Interstate-5, Exit 260 Slater Road Corridor Report and Preliminary Interchange Justification Evaluation August 2013 Prepared By: Gibson Traffic Consultants, Inc. 2802 Wetmore Avenue Suite 220 Everett,
General presentation of WAHIS
 Dr Mauro Meske Veterinary epidemiologist, World Animal Health Information and Analysis Department General presentation of WAHIS Training of OIE National Focal Points for Wildlife (4th Cycle) Nakuru, Kenya,
Dr Mauro Meske Veterinary epidemiologist, World Animal Health Information and Analysis Department General presentation of WAHIS Training of OIE National Focal Points for Wildlife (4th Cycle) Nakuru, Kenya,
Australian Journal of Basic and Applied Sciences. Performance Analysis of Different Types of Adder Using 3-Transistor XOR Gate
 ISSN:1991-8178 Australian Journal of Basic and Applied Sciences Journal home page: www.ajbasweb.com Performance Analysis of Different Types of Adder Using 3-Transistor XOR Gate Lourdy Nivethitha, V. and
ISSN:1991-8178 Australian Journal of Basic and Applied Sciences Journal home page: www.ajbasweb.com Performance Analysis of Different Types of Adder Using 3-Transistor XOR Gate Lourdy Nivethitha, V. and
Building Rapid Interventions to reduce antimicrobial resistance and overprescribing of antibiotics (BRIT)
") Greater Manchester Connected Health City (GM CHC) Building Rapid Interventions to reduce antimicrobial resistance and overprescribing of antibiotics (BRIT) BRIT Dashboard Manual Users: General Practitioners
Greater Manchester Connected Health City (GM CHC) Building Rapid Interventions to reduce antimicrobial resistance and overprescribing of antibiotics (BRIT) BRIT Dashboard Manual Users: General Practitioners
Carsten Behn. Technical Mechanics Group Department of Mechanical Engineering Ilmenau University of Technology / Germany
 Carsten Behn Technical Mechanics Group Department of Mechanical Engineering Ilmenau University of Technology / Germany Preface Outline Introduction - Motivation - Bionic aspects - Living paradigms - Anatomy
Carsten Behn Technical Mechanics Group Department of Mechanical Engineering Ilmenau University of Technology / Germany Preface Outline Introduction - Motivation - Bionic aspects - Living paradigms - Anatomy
Cat Swarm Optimization
 Cat Swarm Optimization Shu-Chuan Chu 1, Pei-wei Tsai 2, and Jeng-Shyang Pan 2 1 Department of Information Management, Cheng Shiu University 2 Department of Electronic Engineering, National Kaohsiung University
Cat Swarm Optimization Shu-Chuan Chu 1, Pei-wei Tsai 2, and Jeng-Shyang Pan 2 1 Department of Information Management, Cheng Shiu University 2 Department of Electronic Engineering, National Kaohsiung University
SERVICE/ASSISTANCE ANIMAL POLICY IN UNIVERSITY HOUSING
 Resource Center for Persons with Disabilities (RCPD) Maximizing Ability & Opportunity Michigan State University Bessey Hall 434 Farm Lane, #120 East Lansing, MI 48824-1033 (517) 884-7273 (517) 355-1293
Resource Center for Persons with Disabilities (RCPD) Maximizing Ability & Opportunity Michigan State University Bessey Hall 434 Farm Lane, #120 East Lansing, MI 48824-1033 (517) 884-7273 (517) 355-1293
Through the eyes of a bird: modelling visually guided obstacle flight
 Through the eyes of a bird: modelling visually guided obstacle flight The Harvard community has made this article openly available. Please share how this access benefits you. Your story matters Citation
Through the eyes of a bird: modelling visually guided obstacle flight The Harvard community has made this article openly available. Please share how this access benefits you. Your story matters Citation
Mendelian Genetics Using Drosophila melanogaster Biology 12, Investigation 1
 Mendelian Genetics Using Drosophila melanogaster Biology 12, Investigation 1 Learning the rules of inheritance is at the core of all biologists training. These rules allow geneticists to predict the patterns
Mendelian Genetics Using Drosophila melanogaster Biology 12, Investigation 1 Learning the rules of inheritance is at the core of all biologists training. These rules allow geneticists to predict the patterns
Serving customers around the world Housing and feeding equipment for modern poultry production in Africa
 Company headquarters in Vechta, Germany Africa headquarters in Edenvale, South Africa Serving customers around the world Housing and feeding equipment for modern poultry production in Africa egg production
Company headquarters in Vechta, Germany Africa headquarters in Edenvale, South Africa Serving customers around the world Housing and feeding equipment for modern poultry production in Africa egg production
Lab: Natural Selection Student Guide
 Lab: Natural Selection Student Guide Prelab Information Purpose Time Question Hypothesis Explore natural selection using a laboratory simulation. Approximately 45 minutes. What is the effect of the type
Lab: Natural Selection Student Guide Prelab Information Purpose Time Question Hypothesis Explore natural selection using a laboratory simulation. Approximately 45 minutes. What is the effect of the type
S Fault Indicators. S.T.A.R. Type CR Faulted Circuit Indicator Installation Instructions. Contents PRODUCT INFORMATION
 Fault Indicators S.T.A.R. Type CR Faulted Circuit Indicator Installation Instructions Service Information S320-75-1 Contents Product Information..........................1 Safety Information............................2
Fault Indicators S.T.A.R. Type CR Faulted Circuit Indicator Installation Instructions Service Information S320-75-1 Contents Product Information..........................1 Safety Information............................2
Welcome to the case study for how I cured my dog s doorbell barking in just 21 days.
 Welcome to the case study for how I cured my dog s doorbell barking in just 21 days. My name is Chet Womach, and I am the founder of TheDogTrainingSecret.com, a website dedicated to giving people simple
Welcome to the case study for how I cured my dog s doorbell barking in just 21 days. My name is Chet Womach, and I am the founder of TheDogTrainingSecret.com, a website dedicated to giving people simple
Life Under Your Feet: Field Research on Box Turtles
 Life Under Your Feet: Field Research on Box Turtles Part I: Our Field Research Site Scientists often work at field research sites. Field research sites are areas in nature that the scientists have chosen
Life Under Your Feet: Field Research on Box Turtles Part I: Our Field Research Site Scientists often work at field research sites. Field research sites are areas in nature that the scientists have chosen
Dogs and Cats Online All of our Puppies in One Basket
 Dogs and Cats Online All of our Puppies in One Basket Now: Many baskets 68 council dog registers. Each has different ways of storing information about Control Orders, and owner Prohibition Orders. 6 SA
Dogs and Cats Online All of our Puppies in One Basket Now: Many baskets 68 council dog registers. Each has different ways of storing information about Control Orders, and owner Prohibition Orders. 6 SA
Outdoor Bark Control
 Outdoor Bark Control operating guide Model Number PBC00-11216 T 1 2 3 OFF Please read this entire guide before beginning Important Safety Information Explanation of Attention Words and Symbols used in
Outdoor Bark Control operating guide Model Number PBC00-11216 T 1 2 3 OFF Please read this entire guide before beginning Important Safety Information Explanation of Attention Words and Symbols used in
OBEDIENCE MOTIVATION TRAINING ADVANCED SEMINAR. January 14 th & 15 th, 2017 Nashville Dog Training Club
 OBEDIENCE MOTIVATION TRAINING ADVANCED SEMINAR January 14 th & 15 th, 2017 Nashville Dog Training Club Proudly Presents LORI DROUIN $200.00-2 day working spot $125.00-2 day audit $ 65.00-1 day audit $160.00-2
OBEDIENCE MOTIVATION TRAINING ADVANCED SEMINAR January 14 th & 15 th, 2017 Nashville Dog Training Club Proudly Presents LORI DROUIN $200.00-2 day working spot $125.00-2 day audit $ 65.00-1 day audit $160.00-2
THE EFFECT OF DISTRACTERS ON STUDENT PERFORMANCE ON THE FORCE CONCEPT INVENTORY
 THE EFFECT OF DISTRACTERS ON STUDENT PERFORMANCE ON THE FORCE CONCEPT INVENTORY N. Sanjay Rebello (srebello@clarion.edu) 104 Peirce Center, Physics Department, Clarion University of Pennsylvania, Clarion,
THE EFFECT OF DISTRACTERS ON STUDENT PERFORMANCE ON THE FORCE CONCEPT INVENTORY N. Sanjay Rebello (srebello@clarion.edu) 104 Peirce Center, Physics Department, Clarion University of Pennsylvania, Clarion,
Dog s best friend. Case study: Kuopion Eläinlääkärikeskus Kuopio, Finland
 Dog s best friend For busy Finnish animal clinic, the mobile DR 100e with MUSICA 3 image processing provides exceptional image quality while speeding up imaging, diagnosis, planning and care Case study:
Dog s best friend For busy Finnish animal clinic, the mobile DR 100e with MUSICA 3 image processing provides exceptional image quality while speeding up imaging, diagnosis, planning and care Case study:
How to Build and Use an Avidog Adventure Box
 How to Build and Use an Avidog Adventure Box PoeticGold Photography able of Contents Building Your Own Adventure Box Supplies and Tools Needed to Build the Frame How to Make the Frame Now Let s Have Some
How to Build and Use an Avidog Adventure Box PoeticGold Photography able of Contents Building Your Own Adventure Box Supplies and Tools Needed to Build the Frame How to Make the Frame Now Let s Have Some