FPGA-based Emotional Behavior Design for Pet Robot
|
|
|
- Shannon McDonald
- 5 years ago
- Views:
Transcription
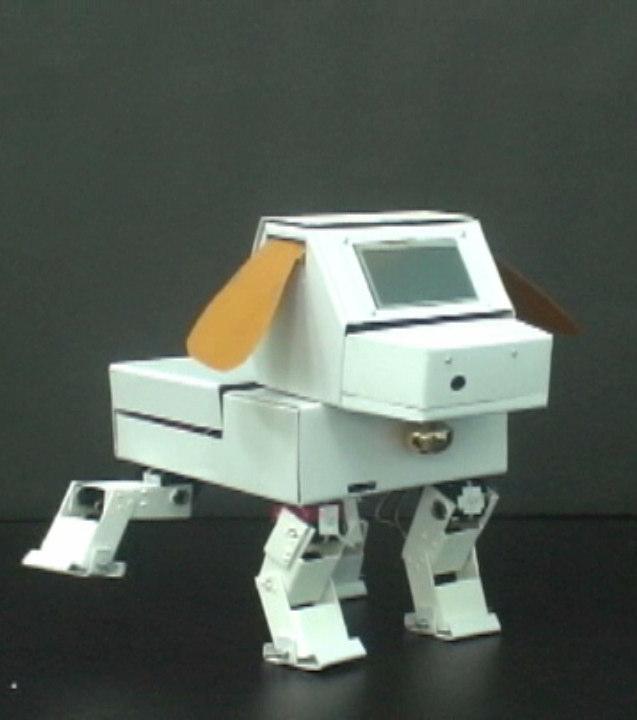
1 FPGA-based Emotional Behavior Design for Pet Robot Chi-Tai Cheng, Shih-An Li, Yu-Ting Yang, and Ching-Chang Wong Department of Electrical Engineering, Tamkang University 151, Ying-Chuan Road, Tamsui, Taipei County, Taiwan. Abstract. This paper introduces a design method of emotion behavior for pet robot. In order to increase the amusement, the pet robot also design with ears, mouth, facial expression plane, and vision system, so that it can do some emotional behaviors. This paper is also proposed a hand gesture recognition algorithm on the pet robot, that makes it can do naturally interaction with human and learn the emotion. These applications are designed and controlled with a FPGA (Field Programmable Gate Array)-based processer. From the experiment results, we know the pet robot execute the human s command as very well. Keywords: Hand Gesture Recognition, Pet Robot, Emotional Behavior, FPGA. 1 Introduction and Background In recent year, the robot technique is researched and developed. Many kinds of robot have its own characteristic and feature. Pet robots with lovely behaviors let them easily to enter human s life [1]. In addition, the pet robot with more intelligence is beginning to be presented to the public [2-7]. In this paper, a pet robot with 16 degrees of freedom (DOFs) is proposed. One vision system, one facial expression, the hand gesture recognition, and the emotion behavior are built in a FPGA-base system. Hardware/Software co-design method is used to accelerate the image recognition. So that the pet robot can recognition the hand gesture from human and do the emotion behavior. The section 2 relates the FPFG-based pet robot design method. The section 3 proposes the hand gesture recognition function. The section 4 explains the design of motion and emotion structure. Then section 5 shows some snapshots of the experiment. 2 FPGA-based Pet Robot Design In order to testing and verify the opinion, this paper designs and builds a pet robot. The pet robot has four legs, a head, two ears and a mouth. There are 16 DOFs and each joint consists of a high torque and gear. The frameworks of pet robot are mainly



2 fabricated from Acrylonitrile Butadiene Styrene (ABS). The ABS stuff has the two characteristics that easy to process and light to reduce the weight of robot. There are 2 DOFs on the ear, 1 DOFs on the neck, 1 DOFs on the mouth, and 3 DOFs in each leg. The photograph and the device of pet robot are shown in Fig. 1 and Fig. 2, respectively. The mechanical views of pet robot are showed in Fig. 3. The mechanical structure is designed and implemented so that the implemented pet robot can do some motions, like walk forward, squat, shake hand, and raise leg. Fig. 1. Photograph of the implemented pet robot. Fig. 2. The device of pet robot.



3 (a) (b) (c) Fig. 3. Mechanical design of the pet robot. (a) Front view, (b) Side view, (c) Back view, and (d) Bird view. (d) We use FPGA as a controller center of pet robot. It proffers sufficient space for designer. In this paper, a DE2 development board is used as our experiment platform. The Cyclone II 2C70 FPGA Chip on DE2 platform is used and placed three soft-core processors on it. The three processors are used to process the image recognition, motion control and emotion learning, respectively. The vision processor is used to process the hand gesture recognition from the vision system of pet robot. The motion processor is used to analyze the motion data and control the motor. The emotion learning processor is used to analyze the environment information and learn emotion. Designing multi-processer in the FPGA chip has three advantages and it is described as follow: First, the processers can share the peripheral component. Sometimes we use same component to process different situations, this design can share the peripheral component, like timer, sensors, I/O port, and reduce the areas of circuit of the pet robot. Second is that the processors can share the same memory. Memory sharing can reduce the time of moving data and gat newest information at real time. Finally, it provides a good Hardware/Software co-design platform. This design can reduce the software design complex of Nios II and raise the system performance. Generally, to design software is easier than hardware, but the hardware circuit execution speed is faster than software execution. Therefore, in this paper, the Hardware/Software co-design method is proposed to promote the effect. In order to maintain the real-time image recognition, the processer execution speed is as soon as possible. Generally, the frequency of Nios II in DE2 development board is less than 200Mhz and not enough to real-time process the image recognition. Therefore, this paper uses a Hardware/Software co-design method to accelerate image
4 recognition. Fig. 4 shows the image recognition flow chart with Hardware/Software co-design method. The processing of hardware circuit includes the function of Image Capture, Geometric Transformations, and Edge Detection. The processing of software includes the Binary Image block and Hand Gesture Recognition. Image Capturing Software core Processer Binary Image Geometric Transformations Edge Detection Hardware core Processer Hand Gesture Recognition Fig. 4. Image recognition with Hardware/Software co-design method. 3 Hand Gesture Recognition In this paper, a hand gesture recognition function is designed to connect human and pet robot. The function flow chart of the system is shown in Fig. 5. According to the number of fingers, the pet robot can understand the human command and do the corresponding motion. Fig. 5. The function flow chart of the hand gesture recognition system

 (1) X 2 2 = X Y (2) distance + (a) (b) Fig. 6.")

 Motions Motion is designed to let the pet robot doing corresponding human command.")
5 Fig. 6 shows the simulation of hand gesture recognition. Fig. 6(b) is the distance chart calculated by Eq. (1) and Eq. (2). In general, the thumb is shorter than other fingers. Therefore, we use two index values to separate the thumb and the other fingers. The index 1 value is smaller than the index 2. Index 1 just uses to find the thumb. The appropriate range of the index values will be chose. The number of the fingers is gotten by add the number of the appropriate range. tan 1 Y angle = ( ) (1) X 2 2 = X Y (2) distance + (a) (b) Fig. 6. The simulation of hand gesture recognition: (a) center point of the object, (b) distances from center point to the edge with index. 4 Motion and Emotion Structure Design In this paper, a pet robot with six motions and six facial expressions are designed. The pet robot will be given vary emotion expression by combining the six motions and six facial expressions. The design of motions and facial expressions are showing as follow: (a) Motions Motion is designed to let the pet robot doing corresponding human command. Some snapshots of the walk forward motion, wave hand motion, wave head motion, raise leg motion and stretch motion of the pet robot are shown in Fig. 7 to Fig. 11.









6 Fig. 7. Walk forward motion. Fig. 8. Wave hand motion Fig. 9. Wave head motion





")
 angry")

")
 sleep")
7 Fig. 10. Raise leg motion Fig. 11. Stretch motion (b) Facial expressions Facial expressions are designed and shown in Fig.12. The facial expression are indicated (a) normal facial, (b) angry facial, (c) nervous facial, (d) happy facial, (e) boring facial and (f) sleep facial, respectively. Fig. 12. Facial expressions


 Doing motion with happy facial, (b) Doing motion with normal facial, (c) Doing motion with angry facial and (d) No doing")

8 5 Experiment Result Some snapshots are shown the experiment results in Fig.13. Once the human s hand is appearing in front of the pet robot, the pet robot will recognize the hand gesture and do the corresponding motions. If we continue sending same commands, the pet robot will out of patience. The angry facial or the boring facial will on the face. And the worst situation is the pet robot won t do any motion. (a) (b) (c) (d) Fig. 13. Emotion experiment. (a) Doing motion with happy facial, (b) Doing motion with normal facial, (c) Doing motion with angry facial and (d) No doing motion and with boring facial on face. 6 Conclusions In this paper, a FPGA-base emotional behavior design for pet robot is implemented. So that the pet robot can use its vision system to recognize the hand gesture and do the interactive motions with human. The pet robot also has four legs, one mouth, one vision system, and one facial expression plane. By combining the motion and facial expression of pet robot, the pet robot can do vary emotion expression.
9 References 1. Forlizzi, J., DiSalvo, C.: Service in the domestic environment: A study of the roomba vacuum in the home. In: Proceedings of the 2006 ACM Conference on Human-Robot Interaction. pp (2006) 2. Pransky, J.: AIBO - the no. 1 selling service robot. In: Industrial Robot. pp (2001) 3. Paviovic, V. I., Sharama, R., Huang, T. S.: Visual Interpretation of Hand Gestures for Human-Computer Interaction: A Review. In: IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 19, no. 7 (1997) 4. Denavit, J. and Hartenberg, R.S.: A kinematic notation for lower-pair mechanisms based on matrices. In: Transactions of ASME, Journal of Applied Mechanics, vol. 22, pp , (1955) 5. Paul, R.P.: Robot Manipulators: Mathematics Programming and Control. In: MIT Press, (1981) 6. Hiros, S.: A study of design and control of a quadruped walking vehicle. In: International Journal of Robotics Research. vol. 3. (1984) 7. Blumberg, B.M., Galyean, T.A.: Multi-level direction of autonomous creatures for realtime virtual environments. In: Proceedings of ACM SIGGRAPH. (1995) 8. Blumberg, B.M., Todd, P.T., Maes, P.: No bad dogs: Ethological lessons for learning in hamsterdam. In: Proceedings of International Conference on Simulated Adaptive Behavior. pp (1996) 9. Yeasion, M., Chaudhuri, S.: Visual understanding of dynamic hand gestures. In: Pattern Recognition Society. vol. 33, pp (2000) 10. Voyles, R.M. and Khosla, P.K.: Tectile gesture for human robot interaction. In: Proceedings of IEEE/RSJ International robots and System Conference, pp (1995)
16-BIT CARRY SELECT ADDER. Anushree Garg B.Tech Scholar, JVW, University, Rajasthan, India
 International Journal of Engineering Science and Generic Research (IJESAR) Available Online at www.ijesar.in Volume 2; Issue 3; May-June-2016; Page No. 19-24 16-BIT CARRY SELECT ADDER Anushree Garg B.Tech
International Journal of Engineering Science and Generic Research (IJESAR) Available Online at www.ijesar.in Volume 2; Issue 3; May-June-2016; Page No. 19-24 16-BIT CARRY SELECT ADDER Anushree Garg B.Tech
Comparative Analysis of Adders Parallel-Prefix Adder for Their Area, Delay and Power Consumption
 2018 IJSRST Volume 4 Issue 5 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology Comparative Analysis of Adders Parallel-Prefix Adder for Their Area, Delay and Power Consumption
2018 IJSRST Volume 4 Issue 5 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology Comparative Analysis of Adders Parallel-Prefix Adder for Their Area, Delay and Power Consumption
The integration of dogs into collaborative humanrobot. - An applied ethological approach - PhD Thesis. Linda Gerencsér Supervisor: Ádám Miklósi
 Eötvös Loránd University, Budapest Doctoral School of Biology, Head: Anna Erdei, DSc Doctoral Program of Ethology, Head: Ádám Miklósi, DSc The integration of dogs into collaborative humanrobot teams -
Eötvös Loránd University, Budapest Doctoral School of Biology, Head: Anna Erdei, DSc Doctoral Program of Ethology, Head: Ádám Miklósi, DSc The integration of dogs into collaborative humanrobot teams -
Development of Design of Initial Cat Robot Model for the Use of Early Treatment of Children with Autism Spectrum Disorder (ASD)
") , pp.90-96 http://dx.doi.org/10.14257/astl.2014.52.16 Development of Design of Initial Cat Robot Model for the Use of Early Treatment of Children with Autism Spectrum Disorder (ASD) Keum Hi Mun 1, Ja Young
, pp.90-96 http://dx.doi.org/10.14257/astl.2014.52.16 Development of Design of Initial Cat Robot Model for the Use of Early Treatment of Children with Autism Spectrum Disorder (ASD) Keum Hi Mun 1, Ja Young
Improving AIBO with Artificial Intelligence Technique
 Improving AIBO with Artificial Intelligence Technique Gun A. Lee endovert@postech.ac.kr Virtual Reality and Interactive Media Laboratory, Department of Computer Science & Engineering, POSTECH, Pohang,
Improving AIBO with Artificial Intelligence Technique Gun A. Lee endovert@postech.ac.kr Virtual Reality and Interactive Media Laboratory, Department of Computer Science & Engineering, POSTECH, Pohang,
Design of 16-Bit Adder Structures - Performance Comparison
 Volume 118 No. 24 2018 ISSN: 1314-3395 (on-line version) url: http://www.acadpubl.eu/hub/ http://www.acadpubl.eu/hub/ Design of 16-Bit Adder Structures - Performance Comparison Padma Balaji R D, Tarun
Volume 118 No. 24 2018 ISSN: 1314-3395 (on-line version) url: http://www.acadpubl.eu/hub/ http://www.acadpubl.eu/hub/ Design of 16-Bit Adder Structures - Performance Comparison Padma Balaji R D, Tarun
Design of 32 bit Parallel Prefix Adders
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735. Volume 6, Issue 1 (May. - Jun. 2013), PP 01-06 Design of 32 bit Parallel Prefix Adders P.Chaitanya
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735. Volume 6, Issue 1 (May. - Jun. 2013), PP 01-06 Design of 32 bit Parallel Prefix Adders P.Chaitanya
A man s best friend. Get attached, wirelessly. Your Artificial Intelligence Companion
 A man s best friend. Get attached, wirelessly. Your Artificial Intelligence Companion Imagine. The fascinating AIBO concept is firmly established in the ambitious project from Sony to create intelligent
A man s best friend. Get attached, wirelessly. Your Artificial Intelligence Companion Imagine. The fascinating AIBO concept is firmly established in the ambitious project from Sony to create intelligent
Australian Journal of Basic and Applied Sciences. Performance Analysis of Different Types of Adder Using 3-Transistor XOR Gate
 ISSN:1991-8178 Australian Journal of Basic and Applied Sciences Journal home page: www.ajbasweb.com Performance Analysis of Different Types of Adder Using 3-Transistor XOR Gate Lourdy Nivethitha, V. and
ISSN:1991-8178 Australian Journal of Basic and Applied Sciences Journal home page: www.ajbasweb.com Performance Analysis of Different Types of Adder Using 3-Transistor XOR Gate Lourdy Nivethitha, V. and
Imagine. AIBO will become, in fact, your best friend.
 Imagine. The fascinating AIBO concept is part of the very conscious ambition from Sony to create intelligent companions for people. To achieve this, a groundbreaking vision to combine Sony fl agship technologies
Imagine. The fascinating AIBO concept is part of the very conscious ambition from Sony to create intelligent companions for people. To achieve this, a groundbreaking vision to combine Sony fl agship technologies
Using Physics for Motion Retargeting
 Thesis Submitted to Utrecht University for the degree of Master of Science Supervisor: drs. Arno Kamphuis INF/SCR-10-13 Utrecht University Department of Computer Science MSc Program: Game and Media Technology
Thesis Submitted to Utrecht University for the degree of Master of Science Supervisor: drs. Arno Kamphuis INF/SCR-10-13 Utrecht University Department of Computer Science MSc Program: Game and Media Technology
INTERNATIONAL JOURNAL OF ADVANCED RESEARCH IN ENGINEERING AND TECHNOLOGY (IJARET)
") INTERNATIONAL JOURNAL OF ADVANCED RESEARCH IN ENGINEERING AND TECHNOLOGY (IJARET) International Journal of Advanced Research in Engineering and Technology (IJARET), ISSN 0976 ISSN 0976-6480 (Print) ISSN
INTERNATIONAL JOURNAL OF ADVANCED RESEARCH IN ENGINEERING AND TECHNOLOGY (IJARET) International Journal of Advanced Research in Engineering and Technology (IJARET), ISSN 0976 ISSN 0976-6480 (Print) ISSN
Comparison of Parallel Prefix Adders Performance in an FPGA
 International Journal of Engineering Research and Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 3, Issue 6 (September 2012), PP. 62-67 Comparison of Parallel Prefix Adders Performance
International Journal of Engineering Research and Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 3, Issue 6 (September 2012), PP. 62-67 Comparison of Parallel Prefix Adders Performance
Implementation and Estimation of Delay, Power and Area for Parallel Prefix Adders
 International Journal for Modern Trends in Science and Technology Volume: 02, Issue No: 11, November 2016 http://www.ijmtst.com ISSN: 2455-3778 Implementation and Estimation of Delay, Power and Area for
International Journal for Modern Trends in Science and Technology Volume: 02, Issue No: 11, November 2016 http://www.ijmtst.com ISSN: 2455-3778 Implementation and Estimation of Delay, Power and Area for
Design and Estimation of delay, power and area for Parallel prefix adders
 Design and Estimation of delay, power and area for Parallel prefix adders Divya Tejaswi Pirati P.G. Scholar, Department of Electronics & Communication Engineering, VRS &YRN College of Engineering & Technology,
Design and Estimation of delay, power and area for Parallel prefix adders Divya Tejaswi Pirati P.G. Scholar, Department of Electronics & Communication Engineering, VRS &YRN College of Engineering & Technology,
A Novel Approach For Error Detection And Correction Using Prefix-Adders
 A Novel Approach For Error Detection And Correction Using Prefix-Adders B. Naga Jyothi* 1, K.S.N.Murthy 2, K.Srinivasarao 3 *1 PG Student Department of ECE, K.L. University Green fields-522502, AP, India
A Novel Approach For Error Detection And Correction Using Prefix-Adders B. Naga Jyothi* 1, K.S.N.Murthy 2, K.Srinivasarao 3 *1 PG Student Department of ECE, K.L. University Green fields-522502, AP, India
STUDY BEHAVIOR OF CERTAIN PARAMETERS AFFECTING ASSESSMENT OF THE QUALITY OF QUAIL EGGS BY COMPUTER VISION SYSTEM
 STUDY BEHAVIOR OF CERTAIN PARAMETERS AFFECTING ASSESSMENT OF THE QUALITY OF QUAIL EGGS BY COMPUTER VISION SYSTEM Zlatin Zlatev, Veselina Nedeva Faculty of Technics and Technologies, Trakia University Graf
STUDY BEHAVIOR OF CERTAIN PARAMETERS AFFECTING ASSESSMENT OF THE QUALITY OF QUAIL EGGS BY COMPUTER VISION SYSTEM Zlatin Zlatev, Veselina Nedeva Faculty of Technics and Technologies, Trakia University Graf
Pet Selective Automated Food Dispenser
 Pet Selective Automated Food Dispenser By Advika Battini Ali Yaqoob Vibhu Vanjari TA: Yuchen He Team Number: 46 Proposal for ECE 445, Senior Design, Spring 2018, University of Illinois Urbana Champaign
Pet Selective Automated Food Dispenser By Advika Battini Ali Yaqoob Vibhu Vanjari TA: Yuchen He Team Number: 46 Proposal for ECE 445, Senior Design, Spring 2018, University of Illinois Urbana Champaign
The City School. Learn Create Program
 Learn Create Program What is Scratch? Scratch is a free programmable toolkit that enables kids to create their own games, animated stories, and interactive art share their creations with one another over
Learn Create Program What is Scratch? Scratch is a free programmable toolkit that enables kids to create their own games, animated stories, and interactive art share their creations with one another over
Dog-Drone Interactions: Towards an ACI Perspective
 Dog-Drone Interactions: Towards an ACI Perspective Anna Zamansky University of Haifa Haifa, Israel annazam@is.haifa.ac.il Abstract As drones are quickly becoming part of our everyday lives, dogs become
Dog-Drone Interactions: Towards an ACI Perspective Anna Zamansky University of Haifa Haifa, Israel annazam@is.haifa.ac.il Abstract As drones are quickly becoming part of our everyday lives, dogs become
The Jet Engine Inventions that Shook the World Series. Jet engine, propeller, Royal Air Force, Frank Whittle, E.A. Griffiths, propulsion
 The Jet Engine Jet engine, propeller, Royal Air Force, Frank Whittle, E.A. Griffiths, propulsion How has the jet engine changed the world since the 1940s? What would be different if it had never been invented?
The Jet Engine Jet engine, propeller, Royal Air Force, Frank Whittle, E.A. Griffiths, propulsion How has the jet engine changed the world since the 1940s? What would be different if it had never been invented?
FPGA Implementation of Efficient 16-Bit Parallel Prefix Kogge Stone Architecture for Convolution Applications Geetha.B 1 Ramachandra.A.
 IJSRD - International Journal for Scientific Research & Development Vol. 2, Issue 05, 2014 ISSN (online): 2321-0613 FPGA Implementation of Efficient 16-Bit Parallel Prefix Kogge Stone Architecture for
IJSRD - International Journal for Scientific Research & Development Vol. 2, Issue 05, 2014 ISSN (online): 2321-0613 FPGA Implementation of Efficient 16-Bit Parallel Prefix Kogge Stone Architecture for
Finch Robot: snap level 4
 Finch Robot: snap level 4 copyright 2017 birdbrain technologies llc the finch is a great way to get started with programming. we'll use snap!, a visual programming language, to control our finch. First,
Finch Robot: snap level 4 copyright 2017 birdbrain technologies llc the finch is a great way to get started with programming. we'll use snap!, a visual programming language, to control our finch. First,
Trends and challenges in Engineering geodesy
 Trends and challenges in Engineering geodesy Rudolf STAIGER rudolf.staiger@hs-bochum.de International Federation of Surveyors Féderation Internationale des Géomètres Internationale Vereinigung der Vermessungsingenieure
Trends and challenges in Engineering geodesy Rudolf STAIGER rudolf.staiger@hs-bochum.de International Federation of Surveyors Féderation Internationale des Géomètres Internationale Vereinigung der Vermessungsingenieure
Representation, Visualization and Querying of Sea Turtle Migrations Using the MLPQ Constraint Database System
 Representation, Visualization and Querying of Sea Turtle Migrations Using the MLPQ Constraint Database System SEMERE WOLDEMARIAM and PETER Z. REVESZ Department of Computer Science and Engineering University
Representation, Visualization and Querying of Sea Turtle Migrations Using the MLPQ Constraint Database System SEMERE WOLDEMARIAM and PETER Z. REVESZ Department of Computer Science and Engineering University
(1) Entertainment Robot ERS-110. Operation Manual. C 1999 by Sony Corporation
 Entertainment Robot ERS-110. Operation Manual. C 1999 by Sony Corporation") 3-867-061-11(1) Entertainment Robot ERS-110 Operation Manual C 1999 by Sony Corporation Entertainment Robot AIBO ERS-110 Operation Manual OPEN-R is the standard interface for the entertainment robot system
3-867-061-11(1) Entertainment Robot ERS-110 Operation Manual C 1999 by Sony Corporation Entertainment Robot AIBO ERS-110 Operation Manual OPEN-R is the standard interface for the entertainment robot system
Design of High Speed Vedic Multiplier Using Carry Select Adder with Brent Kung Adder
 Design of High Speed Vedic Multiplier Using Carry Select Adder with Brent Kung Adder Kathi Anoosha M.Tech(VLSI&ES), AVN Institute of Engineering and Technology. Sasi Kiran, M.Tech Assistant Professor,
Design of High Speed Vedic Multiplier Using Carry Select Adder with Brent Kung Adder Kathi Anoosha M.Tech(VLSI&ES), AVN Institute of Engineering and Technology. Sasi Kiran, M.Tech Assistant Professor,
THE EFIGENIA EJ-1B MOZART S/VTOL
 THE EFIGENIA EJ-1B MOZART S/VTOL Aerial Robotics Autonomous UAV Autocontrolled with an Artificial Intelligent Embedded Guidance, Navigation and Flight Control System Mario Andres Cordoba G, Member, IEEE
THE EFIGENIA EJ-1B MOZART S/VTOL Aerial Robotics Autonomous UAV Autocontrolled with an Artificial Intelligent Embedded Guidance, Navigation and Flight Control System Mario Andres Cordoba G, Member, IEEE
Entertainment Robot aibo Announced
 News & Information Entertainment Robot aibo Announced Sony Corporation 1-7-1 Konan, Minato-ku, Tokyo No. 17-105E November 1, 2017 Tokyo November 1, 2017 - Sony Corporation (Sony) is today proud to announce
News & Information Entertainment Robot aibo Announced Sony Corporation 1-7-1 Konan, Minato-ku, Tokyo No. 17-105E November 1, 2017 Tokyo November 1, 2017 - Sony Corporation (Sony) is today proud to announce
REVIEW OF CARRY SELECT ADDER BY USING BRENT KUNG ADDER
 REVIEW OF CARRY SELECT BY USING BRENT KUNG Pappu P Potdukhe 1, Vishal D Jaiswal 2 Abstract In order to perform the addition of two numbers adder is used Adder also form the integral part of ALU Besides
REVIEW OF CARRY SELECT BY USING BRENT KUNG Pappu P Potdukhe 1, Vishal D Jaiswal 2 Abstract In order to perform the addition of two numbers adder is used Adder also form the integral part of ALU Besides
Modeling and Control of Trawl Systems
 Modeling and Control of Trawl Systems Karl-Johan Reite, SINTEF Fisheries and Aquaculture Supervisor: Professor A. J. Sørensen * Advisor: Professor H. Ellingsen * * Norwegian University of Science and Technology
Modeling and Control of Trawl Systems Karl-Johan Reite, SINTEF Fisheries and Aquaculture Supervisor: Professor A. J. Sørensen * Advisor: Professor H. Ellingsen * * Norwegian University of Science and Technology
Implementation of 16-Bit Area Efficient Ling Carry Select Adder
 Implementation of 16-Bit Area Efficient Ling Carry Select Adder P.Nithin 1, PG Student, SRKR Engineering College, Bhimavaram, India. N.Udaya kumar 2, Professor, SRKR Engineering College, Bhimavaram, India.
Implementation of 16-Bit Area Efficient Ling Carry Select Adder P.Nithin 1, PG Student, SRKR Engineering College, Bhimavaram, India. N.Udaya kumar 2, Professor, SRKR Engineering College, Bhimavaram, India.
Design of Low Power and High Speed Carry Select Adder Using Brent Kung Adder
 Design of Low Power and High Speed Carry Select Adder Using Brent Kung Adder Dr.K.Srinivasulu Professor, Dept of ECE, Malla Reddy Collage of Engineering. Abstract: The binary addition is the basic arithmetic
Design of Low Power and High Speed Carry Select Adder Using Brent Kung Adder Dr.K.Srinivasulu Professor, Dept of ECE, Malla Reddy Collage of Engineering. Abstract: The binary addition is the basic arithmetic
Design of a High Speed Adder
 Design of a High Speed Adder Aritra Mitra 1, Bhavesh Sharma 2, Nilesh Didwania 3 and Amit Bakshi 4 Aritra.mitra000@gmail.com, Abakshi.ece@gmail.com Abstract In this paper we have compared different addition
Design of a High Speed Adder Aritra Mitra 1, Bhavesh Sharma 2, Nilesh Didwania 3 and Amit Bakshi 4 Aritra.mitra000@gmail.com, Abakshi.ece@gmail.com Abstract In this paper we have compared different addition
Cat Swarm Optimization
 Cat Swarm Optimization Shu-Chuan Chu 1, Pei-wei Tsai 2, and Jeng-Shyang Pan 2 1 Department of Information Management, Cheng Shiu University 2 Department of Electronic Engineering, National Kaohsiung University
Cat Swarm Optimization Shu-Chuan Chu 1, Pei-wei Tsai 2, and Jeng-Shyang Pan 2 1 Department of Information Management, Cheng Shiu University 2 Department of Electronic Engineering, National Kaohsiung University
Electromechanical Whole-Body Rotator for Cats
 Electromechanical Whole-Body Rotator for Cats University of Wisconsin Madison College of Engineering Biomedical Engineering BME 301 March 3, 2006 Team Members: Leah Brandon President Adam Budde Communicator
Electromechanical Whole-Body Rotator for Cats University of Wisconsin Madison College of Engineering Biomedical Engineering BME 301 March 3, 2006 Team Members: Leah Brandon President Adam Budde Communicator
Pareto Points in SRAM Design Using the Sleepy Stack Approach
 Pareto Points in SRAM Design Using the Sleepy Stack Approach Jun Cheol Park^ and Vincent J. Mooney III* *Associate Director, ^Center for Research on Embedded Systems and Technology (CREST), http://www.crest.gatech.edu
Pareto Points in SRAM Design Using the Sleepy Stack Approach Jun Cheol Park^ and Vincent J. Mooney III* *Associate Director, ^Center for Research on Embedded Systems and Technology (CREST), http://www.crest.gatech.edu
Turtle Ballet: Simulating Parallel Turtles in a Nonparallel LOGO Version. Erich Neuwirth
 Turtle Ballet: Simulating Parallel Turtles in a Nonparallel LOGO Version Erich Neuwirth University of Vienna, Dept. of Statistics and Decision Support Systems Computer Supported Didactics Working Group
Turtle Ballet: Simulating Parallel Turtles in a Nonparallel LOGO Version Erich Neuwirth University of Vienna, Dept. of Statistics and Decision Support Systems Computer Supported Didactics Working Group
University of Pennsylvania. From Perception and Reasoning to Grasping
 University of Pennsylvania GRASP LAB PR2GRASP: From Perception and Reasoning to Grasping Led by Maxim Likhachev Kostas Daniilides Vijay Kumar Katherine J. Kuchenbecker Jianbo Shi Daniel D. Lee Mark Yim
University of Pennsylvania GRASP LAB PR2GRASP: From Perception and Reasoning to Grasping Led by Maxim Likhachev Kostas Daniilides Vijay Kumar Katherine J. Kuchenbecker Jianbo Shi Daniel D. Lee Mark Yim
Penn Vet s New Bolton Center Launches Revolutionary Robotics-Controlled Equine Imaging System New technology will benefit animals and humans
 Contacts: Louisa Shepard, Communications Specialist for New Bolton Center 610-925-6241, lshepard@vet.upenn.edu Ashley Berke, Penn Vet Director of Communications 215-898-1475, berke@vet.upenn.edu For Immediate
Contacts: Louisa Shepard, Communications Specialist for New Bolton Center 610-925-6241, lshepard@vet.upenn.edu Ashley Berke, Penn Vet Director of Communications 215-898-1475, berke@vet.upenn.edu For Immediate
Research Article Design of Information System for Milking Dairy Cattle and Detection of Mastitis
 Mathematical Problems in Engineering, Article ID 759019, 9 pages http://dx.doi.org/10.1155/2014/759019 Research Article Design of Information System for Milking Dairy Cattle and Detection of Mastitis Ming-Chih
Mathematical Problems in Engineering, Article ID 759019, 9 pages http://dx.doi.org/10.1155/2014/759019 Research Article Design of Information System for Milking Dairy Cattle and Detection of Mastitis Ming-Chih
PetSpy Premium Dog Training Collar, Models M919-1/M919-2
 PetSpy Premium Dog Training Collar, Models M919-1/M919-2 What is in the Package: M919-1/M919-2 Remote Transmitter Receiver Collar / E-Collar Radio Frequency: 900 Mhz Built-in Batteries information: Transmitter:
PetSpy Premium Dog Training Collar, Models M919-1/M919-2 What is in the Package: M919-1/M919-2 Remote Transmitter Receiver Collar / E-Collar Radio Frequency: 900 Mhz Built-in Batteries information: Transmitter:
DEVISE AND INFERENCE OF DELAY, POWER AND AREA FOR ANALOGOUS PREFIX ADDERS
 DEVISE AND INFERENCE OF DELAY, POWER AND AREA FOR ANALOGOUS PREFIX ADDERS P.S.N Bhaskar 1, K.M.Manjunath 2 1,2 Department of ECE, Alwardas Group, Andhra University, (India) ABSTRACT Analogous Prefix Adders
DEVISE AND INFERENCE OF DELAY, POWER AND AREA FOR ANALOGOUS PREFIX ADDERS P.S.N Bhaskar 1, K.M.Manjunath 2 1,2 Department of ECE, Alwardas Group, Andhra University, (India) ABSTRACT Analogous Prefix Adders
MGL Avionics EFIS G2 and iefis. Guide to using the MGL RDAC CAN interface with the UL Power engines
 MGL Avionics EFIS G2 and iefis Guide to using the MGL RDAC CAN interface with the UL Power engines General The RDAC CAN interface forms the bridge between the UL Power ECU and an MGL Avionics G2 EFIS system
MGL Avionics EFIS G2 and iefis Guide to using the MGL RDAC CAN interface with the UL Power engines General The RDAC CAN interface forms the bridge between the UL Power ECU and an MGL Avionics G2 EFIS system
OPERATION AND MAINTENANCE MANUAL
 Personal Drag Lure Coursing Machine OPERATION AND MAINTENANCE MANUAL Congratulations on your new ZippityDog! You have purchased the smallest, highest quality machine on the market and it will give you
Personal Drag Lure Coursing Machine OPERATION AND MAINTENANCE MANUAL Congratulations on your new ZippityDog! You have purchased the smallest, highest quality machine on the market and it will give you
Sheepdog: Alternative software-defined storage on your OpenStack cloud
 Sheepdog: Alternative software-defined storage on your OpenStack cloud Takashi Menjo NTT Software Innovation Center Sheepdog Agenda Introduction of Sheepdog What it is Performance
Sheepdog: Alternative software-defined storage on your OpenStack cloud Takashi Menjo NTT Software Innovation Center Sheepdog Agenda Introduction of Sheepdog What it is Performance
Study on Acoustic Features of Laying Hens Vocalization
 Study on Acoustic Features of Laying Hens Vocalization Ligen Yu 1,*, Guanghui Teng 1, Zhizhong Li 1, and Xuming Liu 2 1 Key Laboratory of Agricultural Engineering in Structure and Environment, China Agricultural
Study on Acoustic Features of Laying Hens Vocalization Ligen Yu 1,*, Guanghui Teng 1, Zhizhong Li 1, and Xuming Liu 2 1 Key Laboratory of Agricultural Engineering in Structure and Environment, China Agricultural
6.836 Embodied Intelligence Final Project: Tom and Jerry. Gleb Chuvpilo, Jessica Howe chuvpilo, May 15, 2002
 Final Project: Tom and Jerry chuvpilo, howej @mit.edu May 15, 2002 Contents 1 Introduction 3 1.1 Basic Design Overview................................ 3 1.2 Behavior........................................
Final Project: Tom and Jerry chuvpilo, howej @mit.edu May 15, 2002 Contents 1 Introduction 3 1.1 Basic Design Overview................................ 3 1.2 Behavior........................................
Pet Selective Automated Food Dispenser
 Pet Selective Automated Food Dispenser By Advika Battini Ali Yaqoob Vibhu Vanjari TA: Yuchen He Team Number: 46 Proposal for ECE 44, Senior Design, Spring 2018, University of Illinois Urbana Champaign
Pet Selective Automated Food Dispenser By Advika Battini Ali Yaqoob Vibhu Vanjari TA: Yuchen He Team Number: 46 Proposal for ECE 44, Senior Design, Spring 2018, University of Illinois Urbana Champaign
Lecture 1: Turtle Graphics. the turtle and the crane and the swallow observe the time of their coming; Jeremiah 8:7
 Lecture 1: Turtle Graphics the turtle and the crane and the sallo observe the time of their coming; Jeremiah 8:7 1. Turtle Graphics The turtle is a handy paradigm for the study of geometry. Imagine a turtle
Lecture 1: Turtle Graphics the turtle and the crane and the sallo observe the time of their coming; Jeremiah 8:7 1. Turtle Graphics The turtle is a handy paradigm for the study of geometry. Imagine a turtle
ABSTRACT. This paper describes the project with emphasis on the dog-collar hardware, behavior-classification software, and feasibility testing.
 Automatic behavior sensing for a bomb-detecting dog Hoa G. Nguyen*, Adam Nans, Kurt Talke, Paul Candela, H.R. Everett Space and Naval Warfare Systems Center Pacific San Diego, CA 92152 ABSTRACT Bomb-detecting
Automatic behavior sensing for a bomb-detecting dog Hoa G. Nguyen*, Adam Nans, Kurt Talke, Paul Candela, H.R. Everett Space and Naval Warfare Systems Center Pacific San Diego, CA 92152 ABSTRACT Bomb-detecting
utca mother board for FMC ADC daughter cards
 utca mother board for FMC ADC daughter cards Stefan Korolczuk National Centre for Nuclear Research, Otwock-Świerk, Poland Warsaw, 2011 S. Korolczuk (NCBJ) Fast EVM Warsaw 2011 1 / 17 Agenda 1 Introduction
utca mother board for FMC ADC daughter cards Stefan Korolczuk National Centre for Nuclear Research, Otwock-Świerk, Poland Warsaw, 2011 S. Korolczuk (NCBJ) Fast EVM Warsaw 2011 1 / 17 Agenda 1 Introduction
How to Design Worlds
 How to Design Worlds CS 5010 Program Design Paradigms Bootcamp Lesson 3.2 Mitchell Wand, 2012-2014 This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License. 1
How to Design Worlds CS 5010 Program Design Paradigms Bootcamp Lesson 3.2 Mitchell Wand, 2012-2014 This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License. 1
Physics Based Ragdoll Animation
 Physics Based Ragdoll Animation Arash Ghodsi & David Wilson Abstract Ragdoll animation is a technique used to add realism to falling bodies with multiple joints, such as a human model. Doing it right can
Physics Based Ragdoll Animation Arash Ghodsi & David Wilson Abstract Ragdoll animation is a technique used to add realism to falling bodies with multiple joints, such as a human model. Doing it right can
Finch Robot: snap levels 1-3
 Finch Robot: snap levels 1-3 copyright 2017 birdbrain technologies llc the finch is a great way to get started with programming. we'll use snap!, a visual programming language, to control our finch. First,
Finch Robot: snap levels 1-3 copyright 2017 birdbrain technologies llc the finch is a great way to get started with programming. we'll use snap!, a visual programming language, to control our finch. First,
Nathan A. Thompson, Ph.D. Adjunct Faculty, University of Cincinnati Vice President, Assessment Systems Corporation
 An Introduction to Computerized Adaptive Testing Nathan A. Thompson, Ph.D. Adjunct Faculty, University of Cincinnati Vice President, Assessment Systems Corporation Welcome! CAT: tests that adapt to each
An Introduction to Computerized Adaptive Testing Nathan A. Thompson, Ph.D. Adjunct Faculty, University of Cincinnati Vice President, Assessment Systems Corporation Welcome! CAT: tests that adapt to each
Design of Modified Low Power and High Speed Carry Select Adder Using Brent Kung Adder
 Journal From the SelectedWorks of Kirat Pal Singh August, 2016 Design of Modified Low Power and High Speed Carry Select Adder Using Brent Kung Adder Amala Maria Alex, Mangalam college of Engineering, Kottayam,
Journal From the SelectedWorks of Kirat Pal Singh August, 2016 Design of Modified Low Power and High Speed Carry Select Adder Using Brent Kung Adder Amala Maria Alex, Mangalam college of Engineering, Kottayam,
PetSpy Advanced Dog Training System, Model M86N
 PetSpy Advanced Dog Training System, Model M86N What is in the Package: PetSpy Advanced Dog Training System: Remote Transmitter Receiver Collar Frequency: 433.825Mhz Transmitter: 3.7V 500mA LiPo Receiver:
PetSpy Advanced Dog Training System, Model M86N What is in the Package: PetSpy Advanced Dog Training System: Remote Transmitter Receiver Collar Frequency: 433.825Mhz Transmitter: 3.7V 500mA LiPo Receiver:
BEng (Hons.) Electronic Engineering. Cohort: BEE/10B/FT. Examinations for / Semester 2
 Electronic Engineering. Cohort: BEE/10B/FT. Examinations for / Semester 2") BEng (Hons.) Electronic Engineering Cohort: BEE/10B/FT Examinations for 2011-2012 / Semester 2 MODULE: INNOVATION AND MARKETING MODULE CODE: MKTG1109 Duration: 2 Hours 30 minutes Reading Time: 10 Minutes
BEng (Hons.) Electronic Engineering Cohort: BEE/10B/FT Examinations for 2011-2012 / Semester 2 MODULE: INNOVATION AND MARKETING MODULE CODE: MKTG1109 Duration: 2 Hours 30 minutes Reading Time: 10 Minutes
Initial Study on Electro-Mechanical Artificial Insemination (AI) Device for Small Ruminants.
 Device for Small Ruminants.") Initial Study on Electro-Mechanical Artificial Insemination (AI) Device for Small Ruminants. SHAFISHUHAZA SAHLAN a AND MASHITAH SHIKH MAIDIN b a Control and Mechanical Engineering Department, Faculty of
Initial Study on Electro-Mechanical Artificial Insemination (AI) Device for Small Ruminants. SHAFISHUHAZA SAHLAN a AND MASHITAH SHIKH MAIDIN b a Control and Mechanical Engineering Department, Faculty of
Simulation of the ASFA system in an ERTMS simulator
 Computers in Railways XI 853 Simulation of the ASFA system in an ERTMS simulator I. Gómez-Rey, J. M. Mera & A. Lorenzo CITEF, Universidad Politécnica de Madrid, Spain Abstract Due to the economic, technical
Computers in Railways XI 853 Simulation of the ASFA system in an ERTMS simulator I. Gómez-Rey, J. M. Mera & A. Lorenzo CITEF, Universidad Politécnica de Madrid, Spain Abstract Due to the economic, technical
Practical Attacks against the MSP430 BSL
 Practical Attacks against the MSP430 BSL [Work in Progress] Travis Goodspeed 1933 Black Oak Street Jefferson City, TN, USA travis@radiantmachines.com ABSTRACT This paper presents a side-channel timing
Practical Attacks against the MSP430 BSL [Work in Progress] Travis Goodspeed 1933 Black Oak Street Jefferson City, TN, USA travis@radiantmachines.com ABSTRACT This paper presents a side-channel timing
acupressure for joint conditions
 The pet owner s guide to acupressure for joint conditions Dr Megan Kelly The pet owner s guide to acupressure for joint conditions onlinepethealth.com 1 Contents Introduction to acupressure 3 Acupressure
The pet owner s guide to acupressure for joint conditions Dr Megan Kelly The pet owner s guide to acupressure for joint conditions onlinepethealth.com 1 Contents Introduction to acupressure 3 Acupressure
Reiki Healing for Cats
 Dear affiliate You are welcome to use the following article either as a webpage, blog post, as an email or any other formats. You may adapt either the layout and/or the wording as you feel appropriate.
Dear affiliate You are welcome to use the following article either as a webpage, blog post, as an email or any other formats. You may adapt either the layout and/or the wording as you feel appropriate.
FREQUENTLY ASKED QUESTIONS Pet Owners
 How does the Assisi Loop work? By emitting bursts of microcurrent electricity, the Assisi Loop creates a field which evenly penetrates both soft and hard body tissue around the target area. This electromagnetic
How does the Assisi Loop work? By emitting bursts of microcurrent electricity, the Assisi Loop creates a field which evenly penetrates both soft and hard body tissue around the target area. This electromagnetic
Design of Carry Select Adder with Binary Excess Converter and Brent Kung Adder Using Verilog HDL
 Design of Carry Select Adder with Binary Excess Converter and Brent Kung Adder Using Verilog HDL Andoju Naveen Kumar M.Tech (VLSI & Embedded System), Siddhartha Institute of Engineering and Technology.
Design of Carry Select Adder with Binary Excess Converter and Brent Kung Adder Using Verilog HDL Andoju Naveen Kumar M.Tech (VLSI & Embedded System), Siddhartha Institute of Engineering and Technology.
5 State of the Turtles
 CHALLENGE 5 State of the Turtles In the previous Challenges, you altered several turtle properties (e.g., heading, color, etc.). These properties, called turtle variables or states, allow the turtles to
CHALLENGE 5 State of the Turtles In the previous Challenges, you altered several turtle properties (e.g., heading, color, etc.). These properties, called turtle variables or states, allow the turtles to
ICAO WCO Joint Conference on Enhancing Air Cargo Security and Facilitation
 ICAO WCO Joint Conference on Enhancing Air Cargo Security and Facilitation IMPLEMENTATION OF MOST PROGRESSIVE METHODS OF USING DOGS FOR CARGO SCREENING Azat G. Zaripov, Deputy Head of Aviation Security
ICAO WCO Joint Conference on Enhancing Air Cargo Security and Facilitation IMPLEMENTATION OF MOST PROGRESSIVE METHODS OF USING DOGS FOR CARGO SCREENING Azat G. Zaripov, Deputy Head of Aviation Security
HOMIE: An Artificial Companion for Elderly People
 HOMIE: An Artificial Companion for Elderly People Simone Kriglstein, Günter Wallner Research Group for Industrial Software, Vienna University of Technology Operngasse 9, 1040 Vienna, Austria simone.kriglstein@inso.tuwien.ac.at,
HOMIE: An Artificial Companion for Elderly People Simone Kriglstein, Günter Wallner Research Group for Industrial Software, Vienna University of Technology Operngasse 9, 1040 Vienna, Austria simone.kriglstein@inso.tuwien.ac.at,
Mannequins and dummies
 Replacing animals used in scientific research Mannequins and dummies ANZCCART Ministry for Primary Industries Replacing animals used in scientific research Scientists are busy developing some really exciting
Replacing animals used in scientific research Mannequins and dummies ANZCCART Ministry for Primary Industries Replacing animals used in scientific research Scientists are busy developing some really exciting
HOW TO... Feather Sex Day-Old Chicks in the Hatchery
 FEATHER SEXING DAY-OLD CHICKS IN THE HATCHERY It is often necessary to sort day-old chicks by sex at the hatchery. To identify females at the parent generation. To separate male and female broilers so
FEATHER SEXING DAY-OLD CHICKS IN THE HATCHERY It is often necessary to sort day-old chicks by sex at the hatchery. To identify females at the parent generation. To separate male and female broilers so
Obedience Guidelines
 Obedience Guidelines Pima County 4H Dog Project rev. Oct. 2018 Obedience Guidelines Obedience allows 4-H ers the opportunity to show their dogs to the best of their ability. Judging is based on the ability
Obedience Guidelines Pima County 4H Dog Project rev. Oct. 2018 Obedience Guidelines Obedience allows 4-H ers the opportunity to show their dogs to the best of their ability. Judging is based on the ability
Body language albert-learning.com
 DEFINITION Body language is a kind of nonverbal communication, where thoughts, intentions, or feelings are expressed by physical behavior, such as facial expressions, body posture, gestures, eye movement,
DEFINITION Body language is a kind of nonverbal communication, where thoughts, intentions, or feelings are expressed by physical behavior, such as facial expressions, body posture, gestures, eye movement,
A Column Generation Algorithm to Solve a Synchronized Log-Truck Scheduling Problem
 A Column Generation Algorithm to Solve a Synchronized Log-Truck Scheduling Problem Odysseus 2012 Greg Rix 12 Louis-Martin Rousseau 12 Gilles Pesant 13 1 Interuniversity Research Centre on Enterprise Networks,
A Column Generation Algorithm to Solve a Synchronized Log-Truck Scheduling Problem Odysseus 2012 Greg Rix 12 Louis-Martin Rousseau 12 Gilles Pesant 13 1 Interuniversity Research Centre on Enterprise Networks,
Active sensing. Ehud Ahissar
 Active sensing Ehud Ahissar 1 Active sensing Passive vs active sensing (touch) Comparison across senses Basic coding principles -------- Perceptual loops Sensation-targeted motor control Proprioception
Active sensing Ehud Ahissar 1 Active sensing Passive vs active sensing (touch) Comparison across senses Basic coding principles -------- Perceptual loops Sensation-targeted motor control Proprioception
Shepherding Behaviors with Multiple Shepherds
 Shepherding Behaviors with Multiple Shepherds Jyh-Ming Lien Samuel Rodríguez neilien@cs.tamu.edu sor8786@cs.tamu.edu Jean-Phillipe Malric Nancy M. Amato sowelrt0@sewanee.edu amato@cs.tamu.edu Technical
Shepherding Behaviors with Multiple Shepherds Jyh-Ming Lien Samuel Rodríguez neilien@cs.tamu.edu sor8786@cs.tamu.edu Jean-Phillipe Malric Nancy M. Amato sowelrt0@sewanee.edu amato@cs.tamu.edu Technical
The Effects of Machine and Poultry Parameters on Feather Plucking
 RESEARCH ARTICLE OPEN ACCESS The Effects of Machine and Poultry Parameters on Feather Plucking Adejumo A. O. D, Adegbie A. M 2, Brai S 2, Oni O. V 2, Opadijo O. O 3. Federal College of Agriculture, Moor
RESEARCH ARTICLE OPEN ACCESS The Effects of Machine and Poultry Parameters on Feather Plucking Adejumo A. O. D, Adegbie A. M 2, Brai S 2, Oni O. V 2, Opadijo O. O 3. Federal College of Agriculture, Moor
Higher National Unit Specification. General information for centres. Unit code: F3V4 34
 Higher National Unit Specification General information for centres Unit title: Dog Training Unit code: F3V4 34 Unit purpose: This Unit provides knowledge and understanding of how dogs learn and how this
Higher National Unit Specification General information for centres Unit title: Dog Training Unit code: F3V4 34 Unit purpose: This Unit provides knowledge and understanding of how dogs learn and how this
~~~***~~~ A Book For Young Programmers On Scratch. ~~~***~~~
 ~~~***~~~ A Book For Young Programmers On Scratch. Golikov Denis & Golikov Artem ~~~***~~~ Copyright Golikov Denis & Golikov Artem 2013 All rights reserved. translator Elizaveta Hesketh License Notes.
~~~***~~~ A Book For Young Programmers On Scratch. Golikov Denis & Golikov Artem ~~~***~~~ Copyright Golikov Denis & Golikov Artem 2013 All rights reserved. translator Elizaveta Hesketh License Notes.
SOP #: Date Issue: Effective Date: Date Last Revision: Page 1 of 5. PPE, approved restraining devices. Disposable gloves, cap, mask, lab coat
 SOP #: Date Issue: Effective Date: Date Last Revision: Page 1 of 5 TITLE SCOPE PURPOSE EQUIPMENT Handling and Restraint of Rats Applies to all Howard University (HU) personnel working with rats in a HU
SOP #: Date Issue: Effective Date: Date Last Revision: Page 1 of 5 TITLE SCOPE PURPOSE EQUIPMENT Handling and Restraint of Rats Applies to all Howard University (HU) personnel working with rats in a HU
Improving the Safety of Telerobotic Drilling of the Skull Base via Photoacoustic Sensing of the Carotid Arteries
 Improving the Safety of Telerobotic Drilling of the Skull Base via Photoacoustic Sensing of the Carotid Arteries Sungmin Kim, Neeraj Gandhi, Muyinatu A. Lediju Bell, and Peter Kazanzides Abstract One of
Improving the Safety of Telerobotic Drilling of the Skull Base via Photoacoustic Sensing of the Carotid Arteries Sungmin Kim, Neeraj Gandhi, Muyinatu A. Lediju Bell, and Peter Kazanzides Abstract One of
Subdomain Entry Vocabulary Modules Evaluation
 Subdomain Entry Vocabulary Modules Evaluation Technical Report Vivien Petras August 11, 2000 Abstract: Subdomain entry vocabulary modules represent a way to provide a more specialized retrieval vocabulary
Subdomain Entry Vocabulary Modules Evaluation Technical Report Vivien Petras August 11, 2000 Abstract: Subdomain entry vocabulary modules represent a way to provide a more specialized retrieval vocabulary
AMAZING VISION 3 WEEK PROGRAM CLASS TWO Holly Tse,
 3 WEEK PROGRAM CLASS TWO Today s Agenda 1. Hear Your Body Exercise 2. Chinese Reflexology and Acupressure 3. Thoughts to Support Seeing Clearly 4. Presence of Mind Exercise 5. Visualization: Using the
3 WEEK PROGRAM CLASS TWO Today s Agenda 1. Hear Your Body Exercise 2. Chinese Reflexology and Acupressure 3. Thoughts to Support Seeing Clearly 4. Presence of Mind Exercise 5. Visualization: Using the
Chapter 6. Dynamic. 6.1 Introduction. 6.2 Case Study/Engineering Application
 Chapter Dynamic. Introduction In the last chapters, we have discussed the static analysis of structures. Static analysis holds when the loads are slowly applied. When the loads are suddenly applied, or
Chapter Dynamic. Introduction In the last chapters, we have discussed the static analysis of structures. Static analysis holds when the loads are slowly applied. When the loads are suddenly applied, or
FreeBonus: Teach your Cavalier King Charles Spaniel 13 Amazing Tricks!
 FreeBonus: Teach your Cavalier King Charles Spaniel 13 Amazing Tricks! You and your King Charles Spaniel may want to while away the idle hours together sometimes? Then, what better way can there be than
FreeBonus: Teach your Cavalier King Charles Spaniel 13 Amazing Tricks! You and your King Charles Spaniel may want to while away the idle hours together sometimes? Then, what better way can there be than
DESIGN AND SIMULATION OF 4-BIT ADDERS USING LT-SPICE
 DESIGN AND SIMULATION OF 4-BIT ADDERS USING LT-SPICE Kumari Amrita 1, Avantika Kumari 2 1,2 B.Tech-M.Tech Student VLSI, Department of Electronics and Communication, Jayoti Vidyapeeth Women's University,
DESIGN AND SIMULATION OF 4-BIT ADDERS USING LT-SPICE Kumari Amrita 1, Avantika Kumari 2 1,2 B.Tech-M.Tech Student VLSI, Department of Electronics and Communication, Jayoti Vidyapeeth Women's University,
Raised Without Antibiotics Analyzing the Impact to Biologic and Economic Performance
 Raised Without Antibiotics Analyzing the Impact to Biologic and Economic Performance Clayton Johnson Director of Health, Carthage System Carthage Veterinary Service Integrated Veterinary Network Presentation
Raised Without Antibiotics Analyzing the Impact to Biologic and Economic Performance Clayton Johnson Director of Health, Carthage System Carthage Veterinary Service Integrated Veterinary Network Presentation
SOAR Research Proposal Summer How do sand boas capture prey they can t see?
 SOAR Research Proposal Summer 2016 How do sand boas capture prey they can t see? Faculty Mentor: Dr. Frances Irish, Assistant Professor of Biological Sciences Project start date and duration: May 31, 2016
SOAR Research Proposal Summer 2016 How do sand boas capture prey they can t see? Faculty Mentor: Dr. Frances Irish, Assistant Professor of Biological Sciences Project start date and duration: May 31, 2016
Proceedings of the ASME nd International Conference on Ocean, Offshore and Arctic Engineering OMAE2013 June 9-14, 2013, Nantes, France
 Proceedings of the ASME 213 32nd International Conference on Ocean, Offshore and Arctic Engineering OMAE213 June 9-14, 213, Nantes, France OMAE213-149 SIMULATION OF HOOKING EVENT IN FISH TRAWLING OPERATION
Proceedings of the ASME 213 32nd International Conference on Ocean, Offshore and Arctic Engineering OMAE213 June 9-14, 213, Nantes, France OMAE213-149 SIMULATION OF HOOKING EVENT IN FISH TRAWLING OPERATION
Caring and. sharing. We love Hong Kong. 2 Small houses News report. 3 Food in a basin Fun and games Description. 4 Computer Jobs Biography
 Current issues Caring and 1 Save the animals sharing Interview We love Hong Kong 2 Small houses News report 3 Food in a basin Fun and games Description STEAM 4 Computer Jobs Biography STEAM House 1 5 What
Current issues Caring and 1 Save the animals sharing Interview We love Hong Kong 2 Small houses News report 3 Food in a basin Fun and games Description STEAM 4 Computer Jobs Biography STEAM House 1 5 What
Help Guide. Locating parts and controls. Getting ready for your life with aibo
 This is provided to help you when you have issues or questions in the course of your life with aibo. The information contained in this is provided based on the assumption that aibo's system software and
This is provided to help you when you have issues or questions in the course of your life with aibo. The information contained in this is provided based on the assumption that aibo's system software and
CONTENTS INTRODUCTION MARKET OPPORTUNITIES PROBLEM STATEMENT OUR TECHNOLOGY. About Bastet. Bastet Game and Digital Currency.
 WHITEPAPER 2018 CONTENTS 02 INTRODUCTION 03 MARKET OPPORTUNITIES 05 PROBLEM STATEMENT 06 OUR TECHNOLOGY 07 About Bastet 08 Bastet Game and Digital Currency 09 How it works 09 Benefits of Bastet token to
WHITEPAPER 2018 CONTENTS 02 INTRODUCTION 03 MARKET OPPORTUNITIES 05 PROBLEM STATEMENT 06 OUR TECHNOLOGY 07 About Bastet 08 Bastet Game and Digital Currency 09 How it works 09 Benefits of Bastet token to
Pixie-7P. Battery Connector Pixie-7P Fuse* Motor. 2.2 Attaching the Motor Leads. 1.0 Features of the Pixie-7P: Pixie-7P Batt Motor
 1.0 Features of the Pixie-7P: Microprocessor controlled Low Resistance (.007 ohms) High rate (2800 Hz) switching (PWM) Up to 7 Amps continuous current (with proper air flow) High Output (1.2amp) Battery
1.0 Features of the Pixie-7P: Microprocessor controlled Low Resistance (.007 ohms) High rate (2800 Hz) switching (PWM) Up to 7 Amps continuous current (with proper air flow) High Output (1.2amp) Battery
IQ Range. Electrical Data 3-Phase Power Supplies. Keeping the World Flowing
 IQ Range Electrical Data 3-Phase Power Supplies Keeping the World Flowing Contents Section Page Introduction 3 50 Hz 380 V 5 0 V 6 415 V 7 4 V 8 500 V 9 6 V 60 Hz 8 V 11 2 V 0 V 13 4 V 14 460 V 15 480
IQ Range Electrical Data 3-Phase Power Supplies Keeping the World Flowing Contents Section Page Introduction 3 50 Hz 380 V 5 0 V 6 415 V 7 4 V 8 500 V 9 6 V 60 Hz 8 V 11 2 V 0 V 13 4 V 14 460 V 15 480
Microchipping Works: Best Practices
 Microchipping Works: Best Practices Linda K. Lord, DVM, PhD, Assistant Professor Department of Veterinary Preventive Medicine, The Ohio State University linda.lord@cvm.osu.edu Introduction Currently a
Microchipping Works: Best Practices Linda K. Lord, DVM, PhD, Assistant Professor Department of Veterinary Preventive Medicine, The Ohio State University linda.lord@cvm.osu.edu Introduction Currently a
Writing Simple Procedures Drawing a Pentagon Copying a Procedure Commanding PenUp and PenDown Drawing a Broken Line...
 Turtle Guide Contents Introduction... 1 What is Turtle Used For?... 1 The Turtle Toolbar... 2 Do I Have Turtle?... 3 Reviewing Your Licence Agreement... 3 Starting Turtle... 3 Key Features... 4 Placing
Turtle Guide Contents Introduction... 1 What is Turtle Used For?... 1 The Turtle Toolbar... 2 Do I Have Turtle?... 3 Reviewing Your Licence Agreement... 3 Starting Turtle... 3 Key Features... 4 Placing
FOOD WEB FOREST MUNCHERS
 FOOD WEB FOREST MUNCHERS Subject: Science Skills: Classification, Comparison, Discussion, Kinesthetic, Large group, Modeling, Simulation Duration: -2 Class Periods Setting: Outside or Large Open Area Materials:
FOOD WEB FOREST MUNCHERS Subject: Science Skills: Classification, Comparison, Discussion, Kinesthetic, Large group, Modeling, Simulation Duration: -2 Class Periods Setting: Outside or Large Open Area Materials:
Our training program... 4
 1 Introduction Agility truly is the ultimate dog sport! It combines speed and precision, teamwork and independence, dog training skills and handler finesse in a wonderfully complex mix. Agility has the
1 Introduction Agility truly is the ultimate dog sport! It combines speed and precision, teamwork and independence, dog training skills and handler finesse in a wonderfully complex mix. Agility has the
Design of Carry Select Adder Using Brent Kung Adder and BEC Adder
 Design of Carry Select Adder Using Brent Kung Adder and BEC Adder Habeebunnisa Begum, B.E M.Tech (VLSI & Embedded Systems), Adusumilli Vijaya Institute of Technology and Research Centre. Abstract: The
Design of Carry Select Adder Using Brent Kung Adder and BEC Adder Habeebunnisa Begum, B.E M.Tech (VLSI & Embedded Systems), Adusumilli Vijaya Institute of Technology and Research Centre. Abstract: The
Canine Exoskeleton. Mid-project Report. Fall Semester Full Report-
 Canine Exoskeleton Mid-project Report Fall Semester 2016 -Full Report- By Jordan Bernhardt Lindy Gillette Colleen Jones Kat Killingsworth Ryan Leuenberger Department of Electrical and Computer Engineering
Canine Exoskeleton Mid-project Report Fall Semester 2016 -Full Report- By Jordan Bernhardt Lindy Gillette Colleen Jones Kat Killingsworth Ryan Leuenberger Department of Electrical and Computer Engineering